















































软件

产品


由于本专栏主要介绍如何将 Jetson Orin NX 作为自主无人机的机载电脑,因此需要 ROS 操作系统来实现各个模块的衔接,ROS支持在Linux系统上安装部署,因为ROS与Ubuntu兼容性最好,使用它的首选开发平台是Ubuntu,并且Ubuntu版本和ROS版本要一致。
需要特别注意的是 Ubuntu 18.04 对应 melodic 版本的 ROS 系统 , Ubuntu 20.04 对应 noetic 版本的 ROS 系统,而之前我们安装的 Jetack 5.1.2 对应的是 Ubuntu 20.04,因此我们需要安装 noetic 版本的 ROS 系统。
参考 ROS 官网的 noetic 安装教程
noetic/Installation/Ubuntu - ROS Wiki
使得 Jetson Orin NX 的系统能够接受 packages.ros.org.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'安装 curl 功能包
sudo apt install curl -ycurl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -首先更新源
sudo apt update接下来开始安装 ROS 桌面完全版
sudo apt install ros-noetic-desktop-full -y安装开始
安装完成
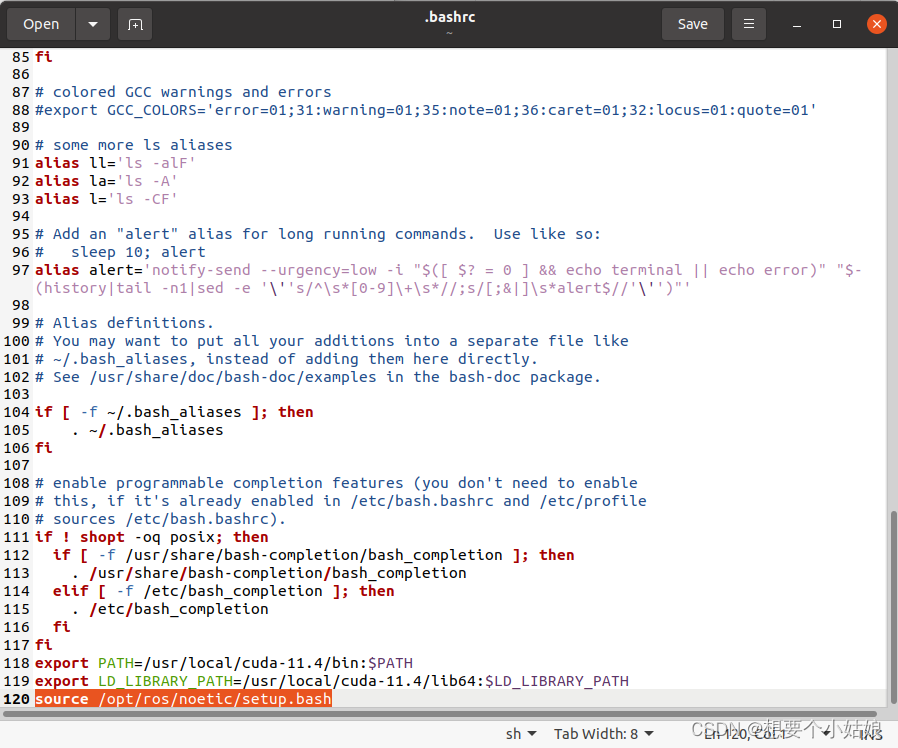
安装完成后将其路径添加到 ~/.bashrc 中
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc此时可以终端输入
gedit ~/.bashrc查看最后一行是否将路径添加成功
然后 source 一下使其生效
source ~/.bashrc安装相关你依赖包
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential -y安装 rosdep
sudo apt install python3-rosdep -y输入以下命令初始化 rosdep
sudo rosdep initrosdep update注意 rosdep update 很容易因为网络问题失败,只要多试几次就行,寻找其他解决方案都很麻烦。
至此 ROS 系统就安装完成了。
终端输入 roscore 测试以下 ROS 系统是否安装成功
roscore 启动成功,至此 ROS 系统就安装完成啦!
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















