















































软件

产品


可以在官网查看各个类型的相机说明
Intel® RealSense™ Computer Vision - Depth and Tracking cameras
https://www.intelrealsense.com
目前实验室常用的是 D400 系列的相机,如 D435i相机,D455相机等,本文主要使用 D435i 相机
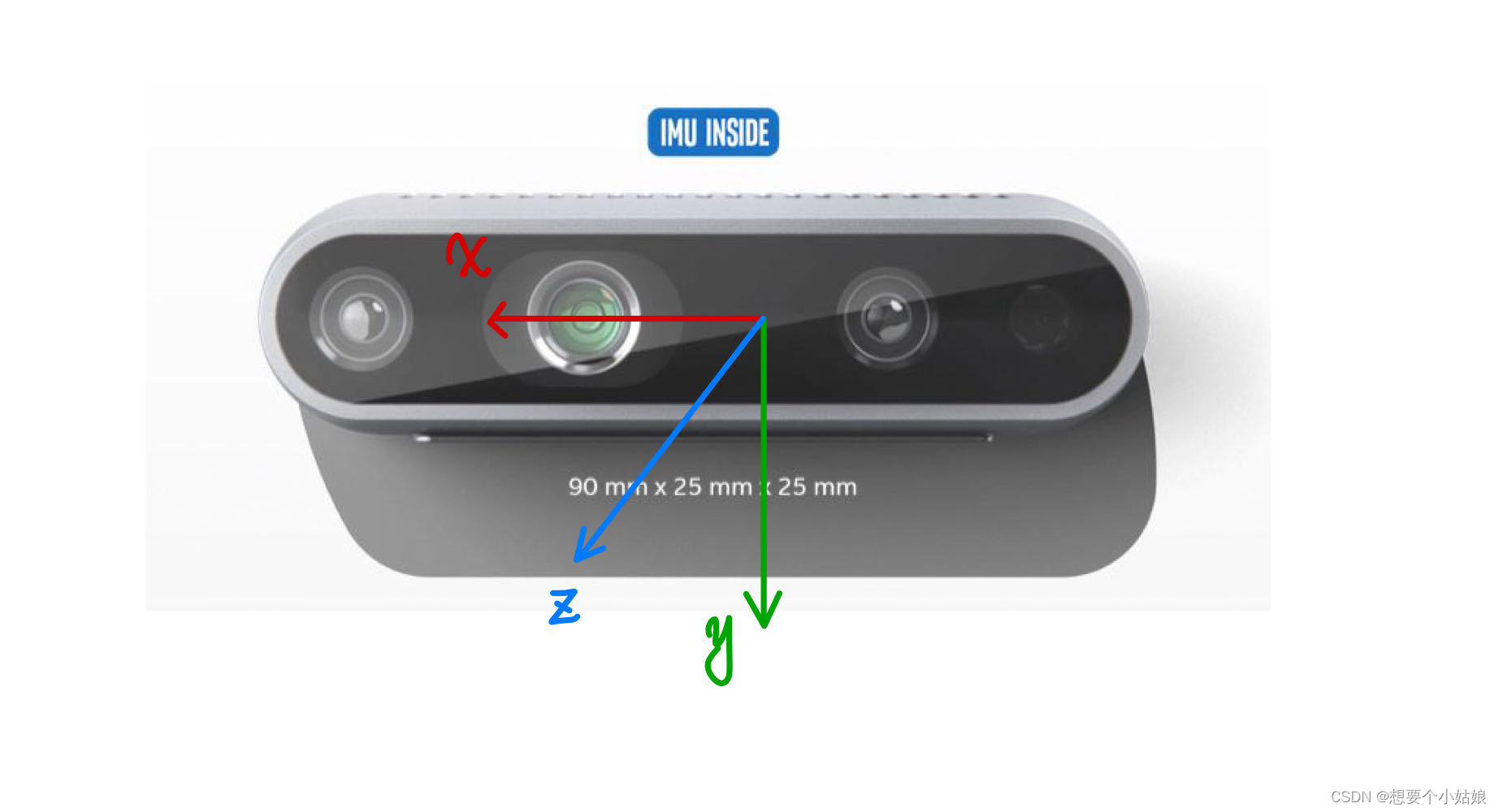
D435i 相机是一个RGB-D相机,也就是我们常说的深度相机,目前深度相机的实现原理主要分为三种:分别是结构光,Tof,双目成像。
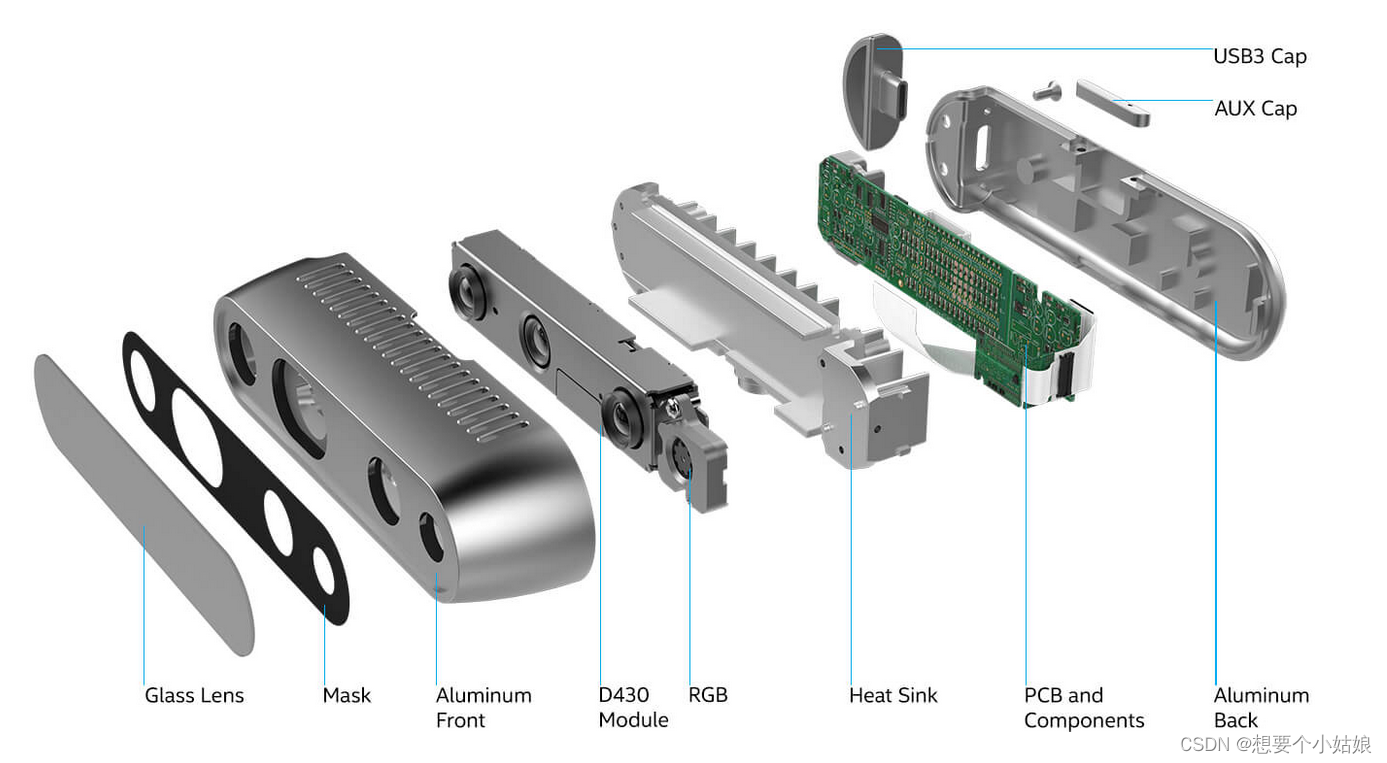
Realsense 使用的是结构光的方案。正面的四个摄像头,从左向右以次是左红外相机,红外点阵投射仪,右红外相机,和RGB相机。
由于 Jetson 的 CPU 性能较差,因此安装 Realsense 前建议先安装 cuda,从而在启动 Realsense 时可以通过 GPU 进行加速,因此这里先安装 cuda,由于我们在烧录 Jetson Orin NX 开发板时安装了相关组件,其中就包括 cuda 组件,因此可以直接通过 apt-get 安装 cuda,终端输入
sudo apt-get updatesudo apt-get install cuda-toolkit-11-4安装完成后查看是否已经 export 安装路径
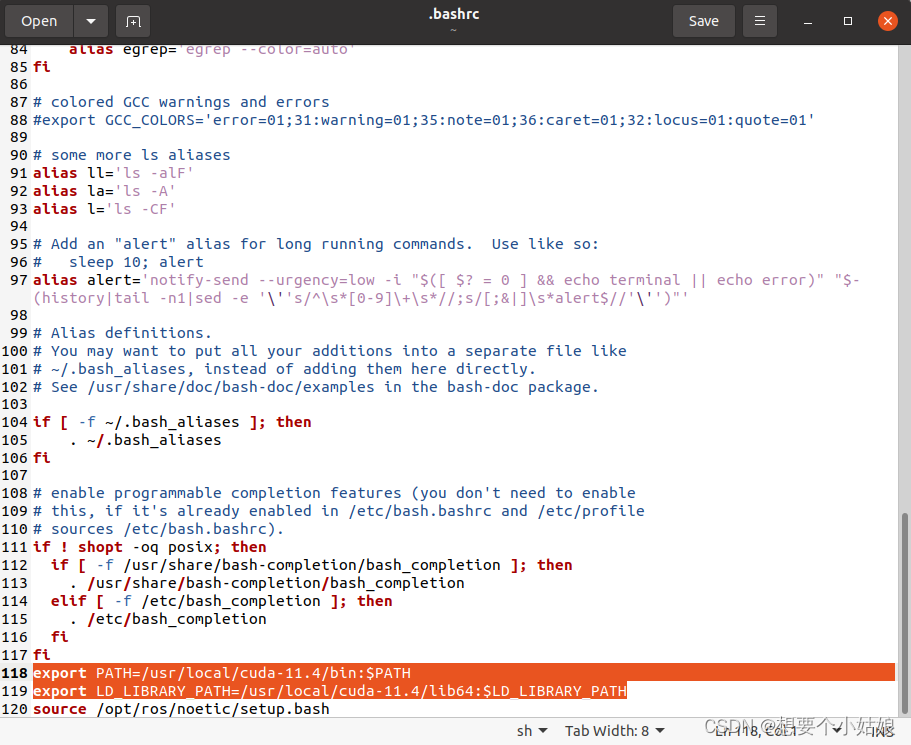
如果没有这两行则加入这两行
export PATH=/usr/local/cuda-11.4/bin:$PATHexport LD_LIBRARY_PATH=/usr/local/cuda-11.4/lib64:$LD_LIBRARY_PATH添加之后 source 一下,使其生效
source ~/.bashrc最后检查 cuda 是否安装成功,终端输入
nvcc -V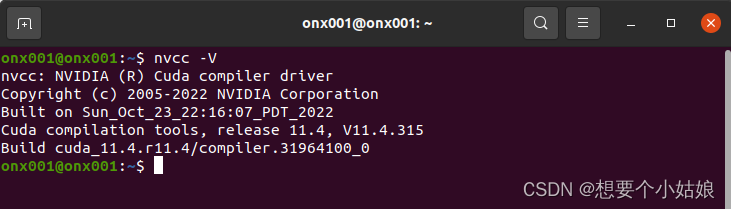
这表明 cuda 安装成功!
Jetson 系列有专门针对 realsense 安装方式,当然传统的 realsense 安装方式也是可行的
传统的安装方式可以参考下文
Ubuntu 20.04 配置 realsense_ubuntu安装realsense2-CSDN博客Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394Ubuntu 20.04 配置 realsense_ubuntu安装realsense2https://blog.csdn.net/qq_44998513/article/details/131517394
但是这里我们采用专门针对 Jetson 的方式进行安装 librealsense,参考
GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development KitsInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDKInstall the Intel RealSense SDK on the NVIDIA Jetson Development Kits - GitHub - jetsonhacks/installRealSenseSDK: Install the Intel RealSense SDK on the NVIDIA Jetson Development Kitshttps://github.com/jetsonhacks/installRealSenseSDK
首先从 github 上下载安装包,终端输入
git clone https://github.com/jetsonhacks/installRealSenseSDK.git下载完成后,进入安装包并开始安装,终端输入
cd ./installRealSenseSDK./installLibrealsense.sh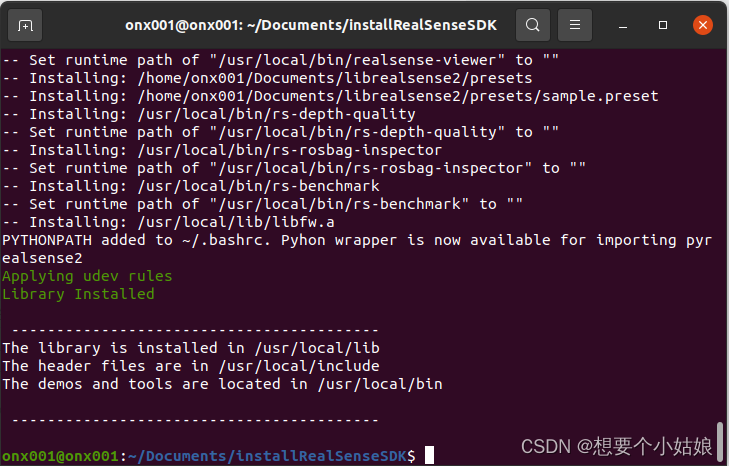
至此 Librealsense 就安装成功了,最后测试 realsense 驱动是否能够正常运行。
首先将 realsense 相机连接上 Jetson Orin NX 开发板(注意这里必须使用 USB 3.0 的数据线连接),然后终端输入
realsense-viewer正常显示图片
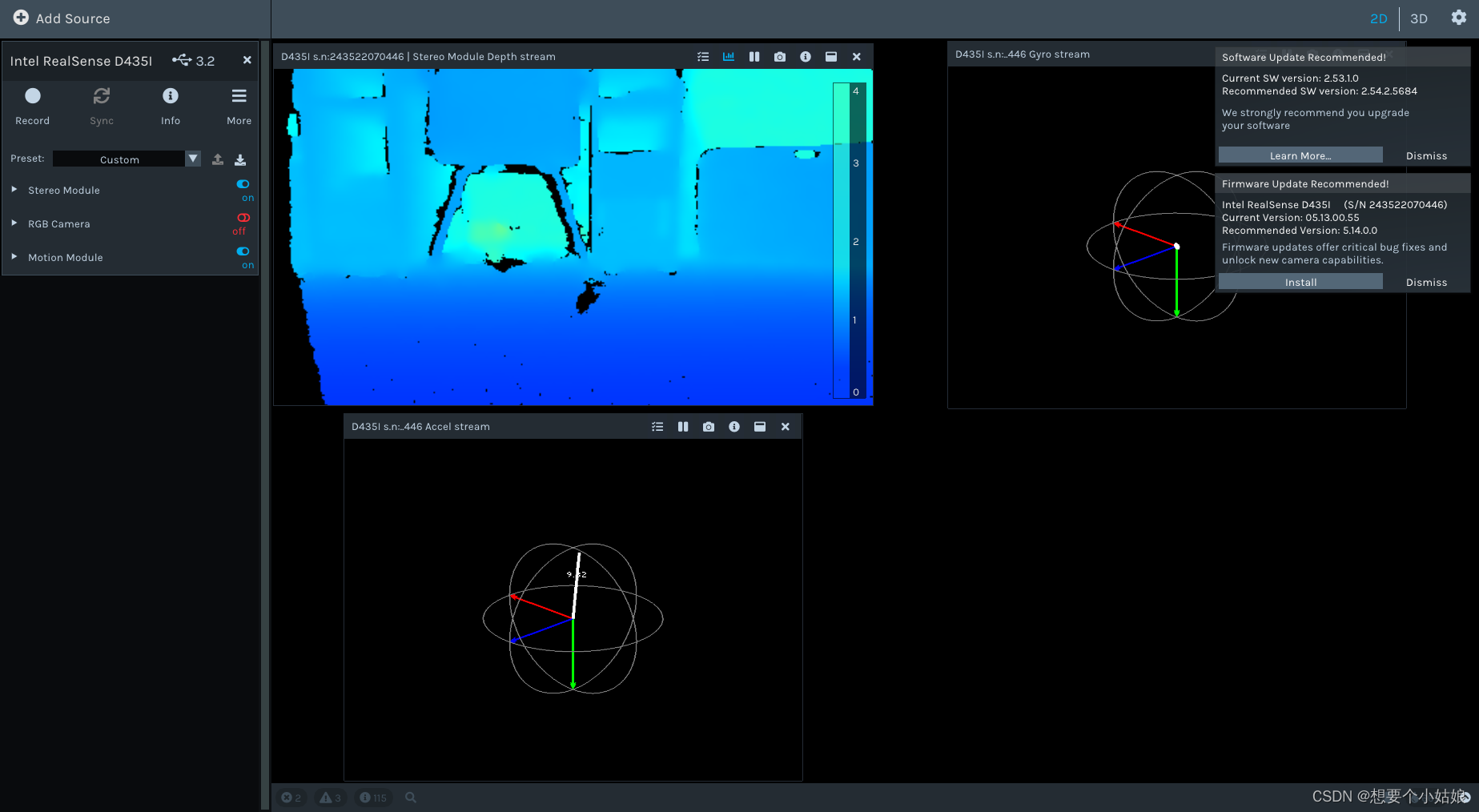
这表明 Realsense 驱动安装成功!
作用:将 realsense 数据转换为 ros 数据并发布到 ros 话题中,相当于realsense 和 ros 的桥梁。
参考 realsense-ros 的 github 官方教程:
GitHub - IntelRealSense/realsense-ros at ros1-legacy
官方提供了直接方式和源码方式两种方法安装 realsense-ros
终端输入:
sudo apt-get install ros-$ROS_DISTRO-realsense2-camera其中 $ROS_DISTRO 为自己的 ros 版本, Ubuntu 18.04 对应 melodic,Ubuntu 20.04 对应 noetic,这种方法的安装路径为
/opt/ros/noetic/share/realsense2_camera/创建工作目录
mkdir -p ~/catkin_pkg/src/cd ~/catkin_pkg/src/下载源码
git clone https://github.com/IntelRealSense/realsense-ros.gitcd realsense-ros/git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`cd ..请确保安装了 ros 软件包 ddynamic_reconfigure, 如果没有安装,可以通过 apt 安装
sudo apt-get install ros-$ROS_DISTRO-ddynamic-reconfigure或者将其源码下载到当前工作目录
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git注意,这里如果通过 apt 安装了 ddynamic_reconfigure 就不要再下载源码到工作空间一起编译了,可能会冲突报错。
接下来编译工作空间
catkin_init_workspacecd ..catkin_make cleancatkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Releasecatkin_make install最后将其加到 ~/.basrc 文件中
echo "source ~/catkin_pkg/devel/setup.bash" >> ~/.bashrcsource ~/.bashrc这两种方法选择一种安装就可以。
测试 realsense-ros 是否安装成功,通过 ros 启动相机,终端输入
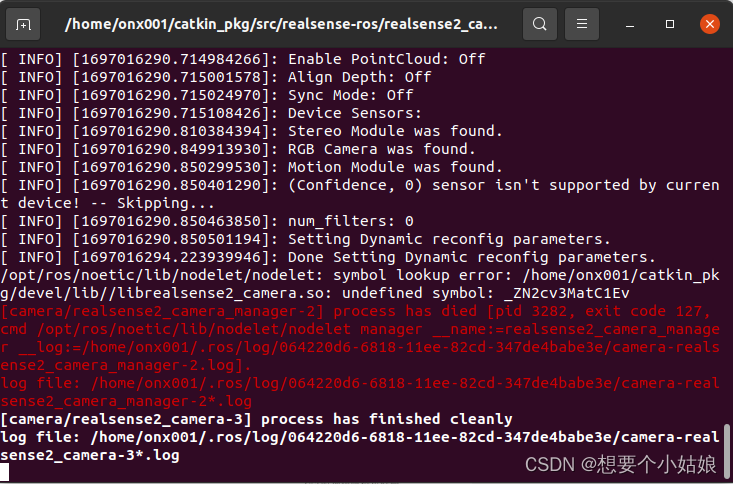
roslaunch realsense2_camera rs_camera.launch如果发现报错
[camera/realsense2_camera_manager-2] process has died [pid 3282, exit code 127, cmd /opt/ros/noetic/lib/nodelet/nodelet manager __name:=realsense2_camera_manager __log:=/home/onx001/.ros/ log /064220d6-6818-11ee-82cd-347de4babe3e/camera-realsense2_camera_manager-2.log].
参考
No GPU usage on jetson xavier NX · Issue #2326 · IntelRealSense/realsense-ros · GitHub
https://github.com/IntelRealSense/realsense-ros/issues/2326
librealsense2 camera.so: undefined symbol:ZN2cV3MatC1EV解决笔记记录-CSDN博客
https://blog.csdn.net/weixin_46151178/article/details/129729719
查看能否收到相机数据。
解决方案
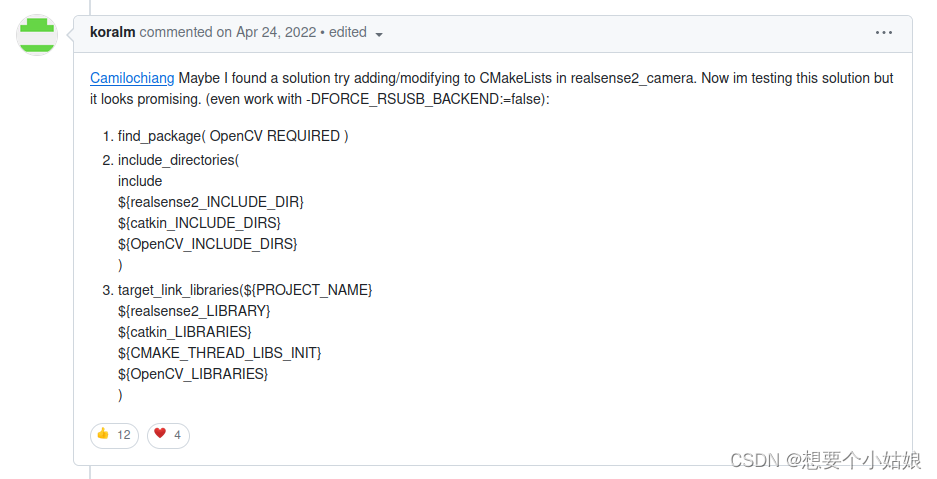
修改 CMakeLists.txt 文件
 添加 OpenCV 功能包,由于安装 ROS 时自带 OpenCV,因此不需要另外安装 OpenCV,直接修改 CMakeLists.txt 文件即可
添加 OpenCV 功能包,由于安装 ROS 时自带 OpenCV,因此不需要另外安装 OpenCV,直接修改 CMakeLists.txt 文件即可
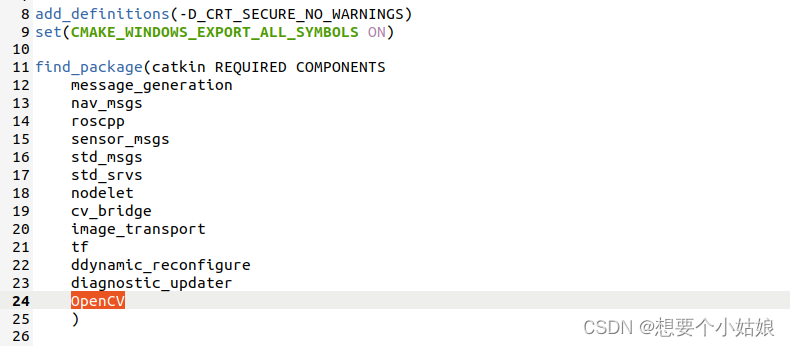

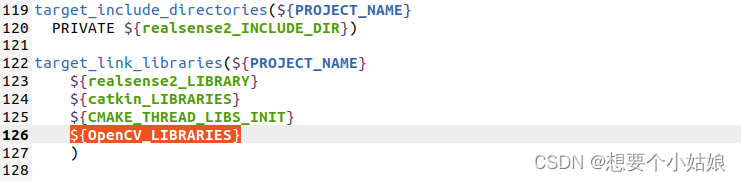
上面红字为添加的内容,也可以复制下面写的
find_package(catkin REQUIRED COMPONENTS message_generation nav_msgs roscpp sensor_msgs std_msgs std_srvs nodelet cv_bridge image_transport tf ddynamic_reconfigure diagnostic_updater OpenCV ) include_directories( include ${realsense2_INCLUDE_DIR} ${catkin_INCLUDE_DIRS} ${OpenCV_INCLUDE_DIRS} ) target_link_libraries(${PROJECT_NAME} ${realsense2_LIBRARY} ${catkin_LIBRARIES} ${CMAKE_THREAD_LIBS_INIT} ${OpenCV_LIBRARIES} )重新测试 realsense-ros 是否安装成功,通过 ros 启动相机,终端输入
roslaunch realsense2_camera rs_camera.launch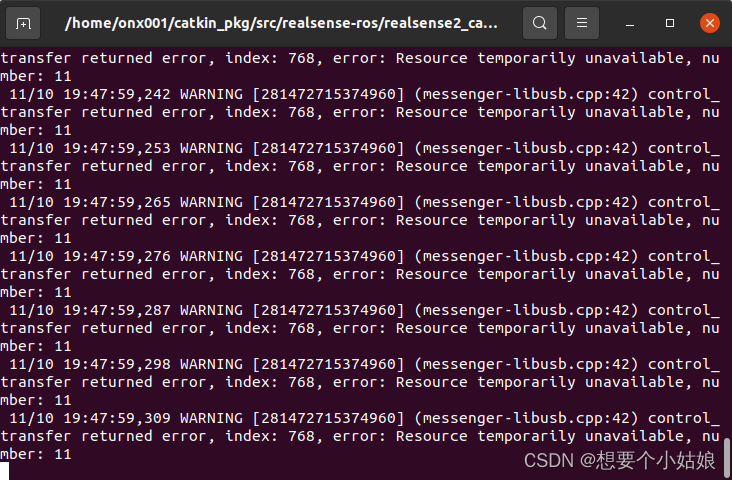
终端输入 rostopic list 显示话题
onx001@onx001:~$ rostopic list /camera/color/camera_info/camera/color/image_raw/camera/color/image_raw/compressed/camera/color/image_raw/compressed/parameter_descriptions/camera/color/image_raw/compressed/parameter_updates/camera/color/image_raw/compressedDepth/camera/color/image_raw/compressedDepth/parameter_descriptions/camera/color/image_raw/compressedDepth/parameter_updates/camera/color/image_raw/theora/camera/color/image_raw/theora/parameter_descriptions/camera/color/image_raw/theora/parameter_updates/camera/color/metadata/camera/depth/camera_info/camera/depth/image_rect_raw/camera/depth/image_rect_raw/compressed/camera/depth/image_rect_raw/compressed/parameter_descriptions/camera/depth/image_rect_raw/compressed/parameter_updates/camera/depth/image_rect_raw/compressedDepth/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions/camera/depth/image_rect_raw/compressedDepth/parameter_updates/camera/depth/image_rect_raw/theora/camera/depth/image_rect_raw/theora/parameter_descriptions/camera/depth/image_rect_raw/theora/parameter_updates/camera/depth/metadata/camera/extrinsics/depth_to_color/camera/motion_module/parameter_descriptions/camera/motion_module/parameter_updates/camera/realsense2_camera_manager/bond/camera/rgb_camera/auto_exposure_roi/parameter_descriptions/camera/rgb_camera/auto_exposure_roi/parameter_updates/camera/rgb_camera/parameter_descriptions/camera/rgb_camera/parameter_updates/camera/stereo_module/auto_exposure_roi/parameter_descriptions/camera/stereo_module/auto_exposure_roi/parameter_updates/camera/stereo_module/parameter_descriptions/camera/stereo_module/parameter_updates/diagnostics/rosout/rosout_agg/tf/tf_staticonx001@onx001:~$ 这表明 realsense-ros 安装成功!
一般来说,安装完成后可能会出现 ros 能接收到话题但是收不到数据的情况。
这时需要修改 ~/catkin_pkg/src/realsense2_camera/rs_camera.launch 文件。
先备份 rs_camera.launch 文件,终端输入
cd ~/catkin_pkg/src/realsense-ros/realsense2_camera/launchcp ./rs_camera.launch ./rs_camera.launch.bak然后将 rs_camera.launch 文件内容替换为如下内容
<launch> <arg name="serial_no" default=""/> <arg name="usb_port_id" default=""/> <arg name="device_type" default=""/> <arg name="json_file_path" default=""/> <arg name="camera" default="camera"/> <arg name="tf_prefix" default="$(arg camera)"/> <arg name="external_manager" default="false"/> <arg name="manager" default="realsense2_camera_manager"/> <arg name="output" default="screen"/> <arg name="respawn" default="false"/> <arg name="fisheye_width" default="-1"/> <arg name="fisheye_height" default="-1"/> <arg name="enable_fisheye" default="false"/> <arg name="depth_width" default="640"/> <arg name="depth_height" default="480"/> <arg name="enable_depth" default="true"/> <arg name="confidence_width" default="-1"/> <arg name="confidence_height" default="-1"/> <arg name="enable_confidence" default="false"/> <arg name="confidence_fps" default="-1"/> <arg name="infra_width" default="640"/> <arg name="infra_height" default="480"/> <arg name="enable_infra" default="false"/> <arg name="enable_infra1" default="true"/> <arg name="enable_infra2" default="true"/> <arg name="infra_rgb" default="false"/> <arg name="color_width" default="-1"/> <arg name="color_height" default="-1"/> <arg name="enable_color" default="false"/> <arg name="fisheye_fps" default="-1"/> <arg name="depth_fps" default="30"/> <arg name="infra_fps" default="30"/> <arg name="color_fps" default="-1"/> <arg name="gyro_fps" default="400"/> <arg name="accel_fps" default="400"/> <arg name="enable_gyro" default="true"/> <arg name="enable_accel" default="true"/> <arg name="enable_pointcloud" default="false"/> <arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/> <arg name="pointcloud_texture_index" default="0"/> <arg name="allow_no_texture_points" default="false"/> <arg name="ordered_pc" default="false"/> <arg name="enable_sync" default="false"/> <arg name="align_depth" default="false"/> <arg name="publish_tf" default="true"/> <arg name="tf_publish_rate" default="0"/> <arg name="filters" default=""/> <arg name="clip_distance" default="-2"/> <arg name="linear_accel_cov" default="0.01"/> <arg name="initial_reset" default="false"/> <arg name="reconnect_timeout" default="6.0"/> <arg name="wait_for_device_timeout" default="-1.0"/> <arg name="unite_imu_method" default="linear_interpolation"/> <arg name="topic_odom_in" default="odom_in"/> <arg name="calib_odom_file" default=""/> <arg name="publish_odom_tf" default="true"/> <arg name="stereo_module/exposure/1" default="7500"/> <arg name="stereo_module/gain/1" default="16"/> <arg name="stereo_module/exposure/2" default="1"/> <arg name="stereo_module/gain/2" default="16"/> <arg name="emitter_enable" default="false"/> <!-- rosparam set /camera/stereo_module/emitter_enabled false --> <rosparam> /camera/stereo_module/emitter_enabled: 0 </rosparam> <rosparam if="$(arg emitter_enable)"> /camera/stereo_module/emitter_enabled: 1 </rosparam> <group ns="$(arg camera)"> <include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml"> <arg name="tf_prefix" value="$(arg tf_prefix)"/> <arg name="external_manager" value="$(arg external_manager)"/> <arg name="manager" value="$(arg manager)"/> <arg name="output" value="$(arg output)"/> <arg name="respawn" value="$(arg respawn)"/> <arg name="serial_no" value="$(arg serial_no)"/> <arg name="usb_port_id" value="$(arg usb_port_id)"/> <arg name="device_type" value="$(arg device_type)"/> <arg name="json_file_path" value="$(arg json_file_path)"/> <arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/> <arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/> <arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/> <arg name="enable_sync" value="$(arg enable_sync)"/> <arg name="align_depth" value="$(arg align_depth)"/> <arg name="fisheye_width" value="$(arg fisheye_width)"/> <arg name="fisheye_height" value="$(arg fisheye_height)"/> <arg name="enable_fisheye" value="$(arg enable_fisheye)"/> <arg name="depth_width" value="$(arg depth_width)"/> <arg name="depth_height" value="$(arg depth_height)"/> <arg name="enable_depth" value="$(arg enable_depth)"/> <arg name="confidence_width" value="$(arg confidence_width)"/> <arg name="confidence_height" value="$(arg confidence_height)"/> <arg name="enable_confidence" value="$(arg enable_confidence)"/> <arg name="confidence_fps" value="$(arg confidence_fps)"/> <arg name="color_width" value="$(arg color_width)"/> <arg name="color_height" value="$(arg color_height)"/> <arg name="enable_color" value="$(arg enable_color)"/> <arg name="infra_width" value="$(arg infra_width)"/> <arg name="infra_height" value="$(arg infra_height)"/> <arg name="enable_infra" value="$(arg enable_infra)"/> <arg name="enable_infra1" value="$(arg enable_infra1)"/> <arg name="enable_infra2" value="$(arg enable_infra2)"/> <arg name="infra_rgb" value="$(arg infra_rgb)"/> <arg name="fisheye_fps" value="$(arg fisheye_fps)"/> <arg name="depth_fps" value="$(arg depth_fps)"/> <arg name="infra_fps" value="$(arg infra_fps)"/> <arg name="color_fps" value="$(arg color_fps)"/> <arg name="gyro_fps" value="$(arg gyro_fps)"/> <arg name="accel_fps" value="$(arg accel_fps)"/> <arg name="enable_gyro" value="$(arg enable_gyro)"/> <arg name="enable_accel" value="$(arg enable_accel)"/> <arg name="publish_tf" value="$(arg publish_tf)"/> <arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/> <arg name="filters" value="$(arg filters)"/> <arg name="clip_distance" value="$(arg clip_distance)"/> <arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/> <arg name="initial_reset" value="$(arg initial_reset)"/> <arg name="reconnect_timeout" value="$(arg reconnect_timeout)"/> <arg name="wait_for_device_timeout" value="$(arg wait_for_device_timeout)"/> <arg name="unite_imu_method" value="$(arg unite_imu_method)"/> <arg name="topic_odom_in" value="$(arg topic_odom_in)"/> <arg name="calib_odom_file" value="$(arg calib_odom_file)"/> <arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/> <arg name="stereo_module/exposure/1" value="$(arg stereo_module/exposure/1)"/> <arg name="stereo_module/gain/1" value="$(arg stereo_module/gain/1)"/> <arg name="stereo_module/exposure/2" value="$(arg stereo_module/exposure/2)"/> <arg name="stereo_module/gain/2" value="$(arg stereo_module/gain/2)"/> <arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/> <arg name="ordered_pc" value="$(arg ordered_pc)"/> </include> </group></launch>最后终端输入
roslaunch realsense2_camera rs_camera.launch此时输出 imu 等信息,并且屏蔽了结构光
/camera/accel/imu_info/camera/depth/camera_info/camera/depth/image_rect_raw/camera/depth/image_rect_raw/compressed/camera/depth/image_rect_raw/compressed/parameter_descriptions/camera/depth/image_rect_raw/compressed/parameter_updates/camera/depth/image_rect_raw/compressedDepth/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions/camera/depth/image_rect_raw/compressedDepth/parameter_updates/camera/depth/image_rect_raw/theora/camera/depth/image_rect_raw/theora/parameter_descriptions/camera/depth/image_rect_raw/theora/parameter_updates/camera/depth/metadata/camera/extrinsics/depth_to_infra1/camera/extrinsics/depth_to_infra2/camera/gyro/imu_info/camera/imu/camera/infra1/camera_info/camera/infra1/image_rect_raw/camera/infra1/image_rect_raw/compressed/camera/infra1/image_rect_raw/compressed/parameter_descriptions/camera/infra1/image_rect_raw/compressed/parameter_updates/camera/infra1/image_rect_raw/compressedDepth/camera/infra1/image_rect_raw/compressedDepth/parameter_descriptions/camera/infra1/image_rect_raw/compressedDepth/parameter_updates/camera/infra1/image_rect_raw/theora/camera/infra1/image_rect_raw/theora/parameter_descriptions/camera/infra1/image_rect_raw/theora/parameter_updates/camera/infra1/metadata/camera/infra2/camera_info/camera/infra2/image_rect_raw/camera/infra2/image_rect_raw/compressed/camera/infra2/image_rect_raw/compressed/parameter_descriptions/camera/infra2/image_rect_raw/compressed/parameter_updates/camera/infra2/image_rect_raw/compressedDepth/camera/infra2/image_rect_raw/compressedDepth/parameter_descriptions/camera/infra2/image_rect_raw/compressedDepth/parameter_updates/camera/infra2/image_rect_raw/theora/camera/infra2/image_rect_raw/theora/parameter_descriptions/camera/infra2/image_rect_raw/theora/parameter_updates/camera/infra2/metadata/camera/motion_module/parameter_descriptions/camera/motion_module/parameter_updates/camera/realsense2_camera_manager/bond/camera/rgb_camera/parameter_descriptions/camera/rgb_camera/parameter_updates/camera/stereo_module/auto_exposure_roi/parameter_descriptions/camera/stereo_module/auto_exposure_roi/parameter_updates/camera/stereo_module/parameter_descriptions/camera/stereo_module/parameter_updates/diagnostics/rosout/rosout_agg/tf/tf_static至此,Realsense 驱动就安装完成了,并且实现了与 ROS 系统的连接!
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















