















































软件

产品


此处是基于 MATLAB RVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向 运动学分析 ,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。
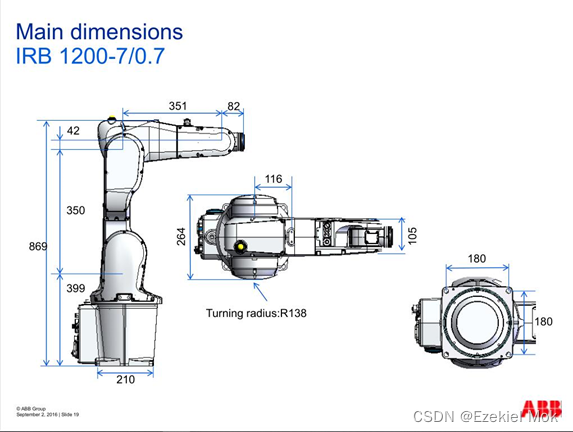
图1. ABB IRB 1200 尺寸参数示意图
ABB IRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接口、坚固耐用等的特点。全新设计:IRB 1200 的设计兼顾功能与美观。光洁的表面便于清洁和保养。IRB 1200 第2轴无外凸,使其具有比其他小型机器 人更长的行程,缩短了机器人与工件之间的距离。小型化的体积: IRB 1200机身小巧,有效工作范围宽大,有利于加快生产节拍,减少设备占用空间。 易于集成:IRB 1200 内置4 条气管、10 路用户信号线及以太网线,在设计上充分考虑了集成的便利性。坚固耐用:两种型号的 IRB 1200 均能以任意角度安装,标配IP 40防护等级, 可选IP 67防护等级。
该机器人的旋转副定义如图2所示,包含6个旋转关节,机械臂末端具有x、y、z、rotx、roty rotz六个自由度,其中前三个是平移自由度,后三个是旋转自由度,通过对机械臂各个关节进行坐标系建立可以得到图3所示的坐标关系图。
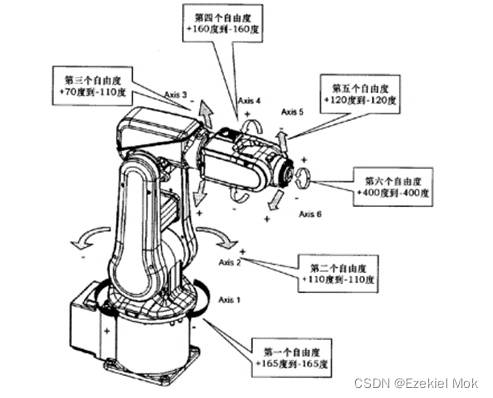
图2. ABB-IRB-1200 关节示意图
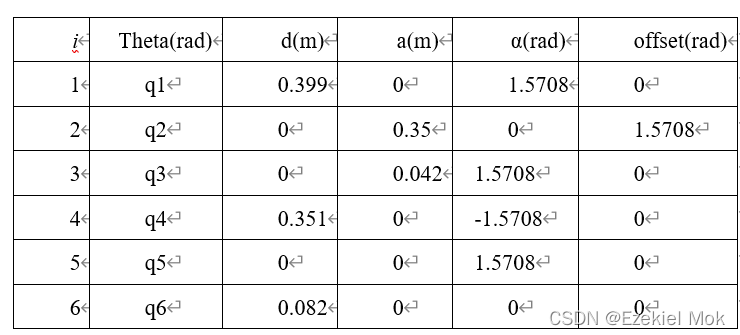
根据ABB1200机器人的关节布置,可以根据机器人学上的坐标选取原则选取机器人每个关节的坐标系,并根据关节连杆关系推导得出坐标之间的变换矩阵。机器人建模中的连杆坐标系的几个选取原则:(1)连杆n两端有关节n和n+1关节坐标系z轴的建立:旋转关节,按右手旋转的方向,变量为旋转角θ;(2)滑动关节,定义z轴为沿直线运动方向,变量为沿z轴的连杆长度d;(3)定义关节n的z轴编号为n-1;(4)关节不一定平行或相交(5)两关节的z轴(zn和zn+1)必有一条距离最短的公垂线an+1 xn+1方向为沿an+1方向(5)若两个关节z轴平行,则有无数条公垂线,选择与前一关节的公垂线共线的一条公垂线;(6)若两个关节z轴相交,则选择垂直于zn和zn+1构成的平面的直线作为x轴。结合ABB-IRB-1200 关节形式与尺寸可得机器人的坐标系c0到c6的示意图如下,其中θi为关节角度变量,z逆时针方向为正方向。其中,
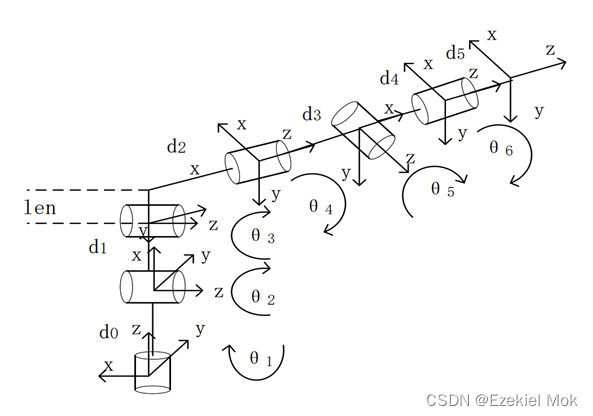
图3. ABB-IRB-1200 机械臂坐标定义图示
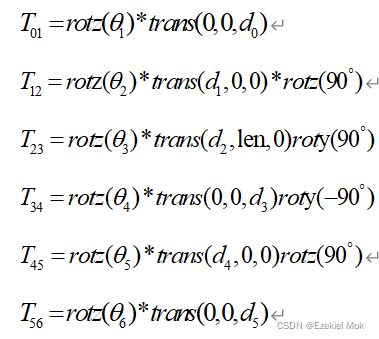
所以每个坐标之间的传递矩阵可以表示为
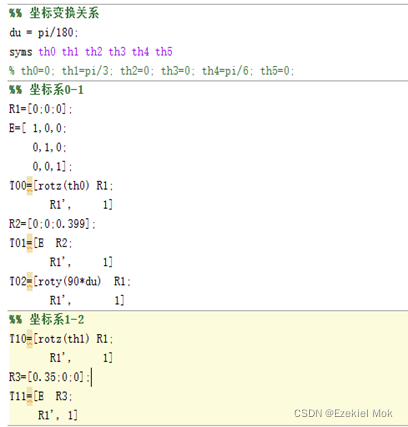
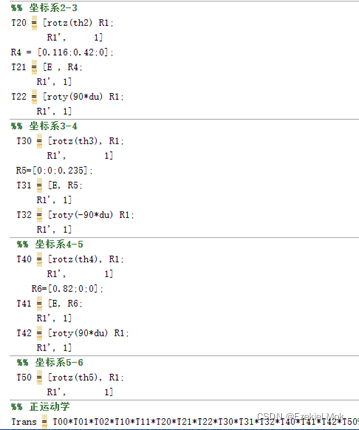
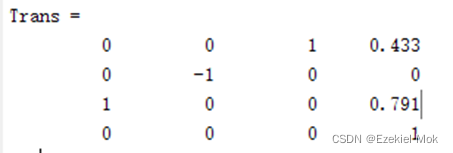
通过代入符号变量运算可得正运动的表达式如图(不全,具体见附录),带入具体关节角度验证可得如下图, RVC工具箱DH建模得到的数值对比验证可得建模无误。

根据上述的DH矩阵参数,根据DH建模的选取原则设计如下的基于RVC程序。
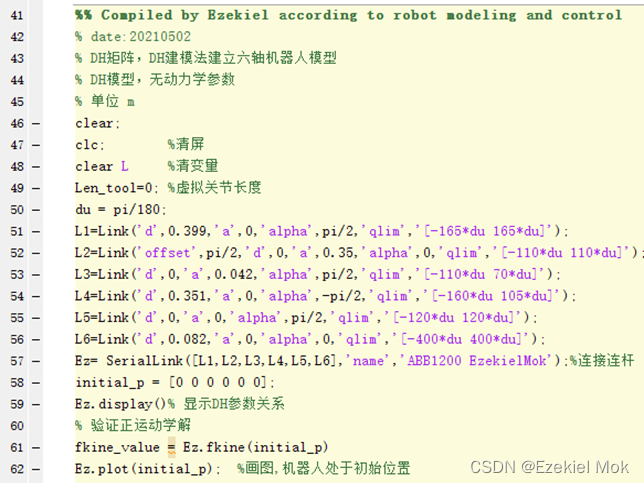
程序反馈显示出的机器人DH参数。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















