






































































1、Adams的运动学建模
在Adams中建立机械臂模型,如图1所示,箭头为机械臂末端执行器的初始位置。
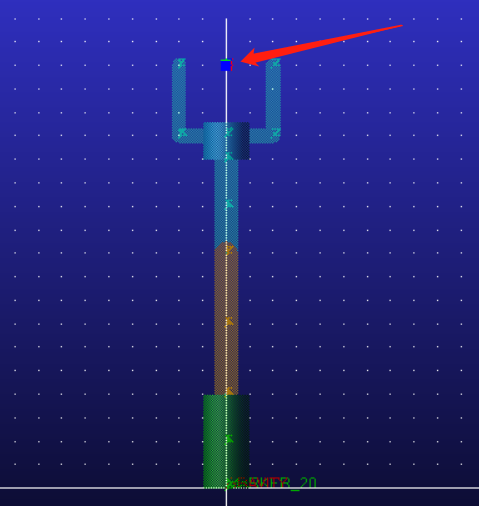
图1 初始位置
2、Matlab编写运动学方程
通过机械臂几何信息建立机械臂的DH参数
|
α |
θ |
a |
d |
|
|
1 |
0 |
0 |
0 |
0 |
|
2 |
0 |
0 |
300 |
0 |
|
3 |
0 |
0 |
200 |
0 |
图2 DH参数
根据DH参数利用matlab编写运动学程序,程序如图3所示
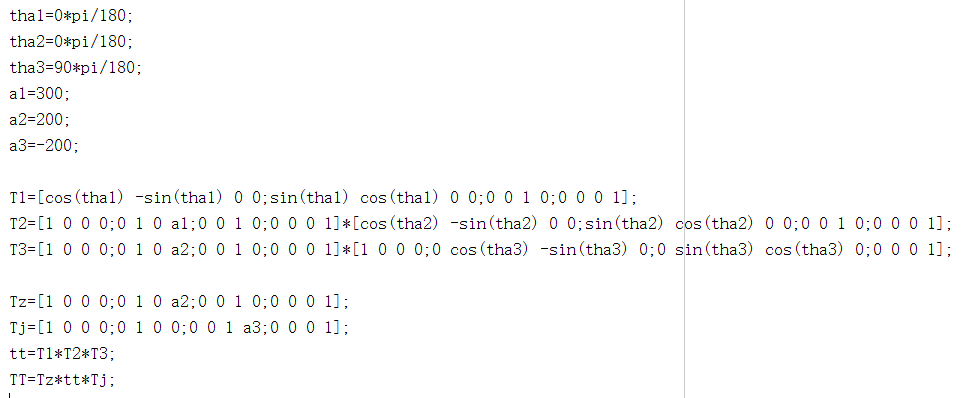
图3 matlab程序
3、运动学验证
运行程序得出初始位置如图4所示,
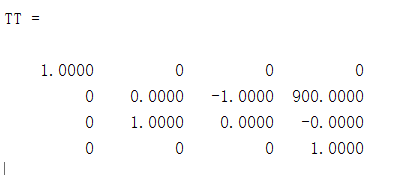
图4 计算的初始位置
Adams中初始位置信息,如图5所示
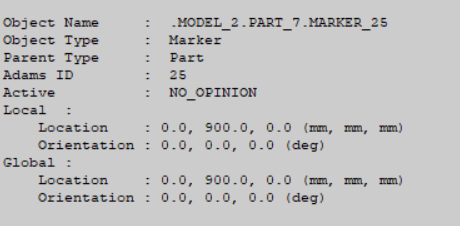
图5 Adams初始位置
改变机械臂的θ值再次进行验证如图6所示,验证成功。
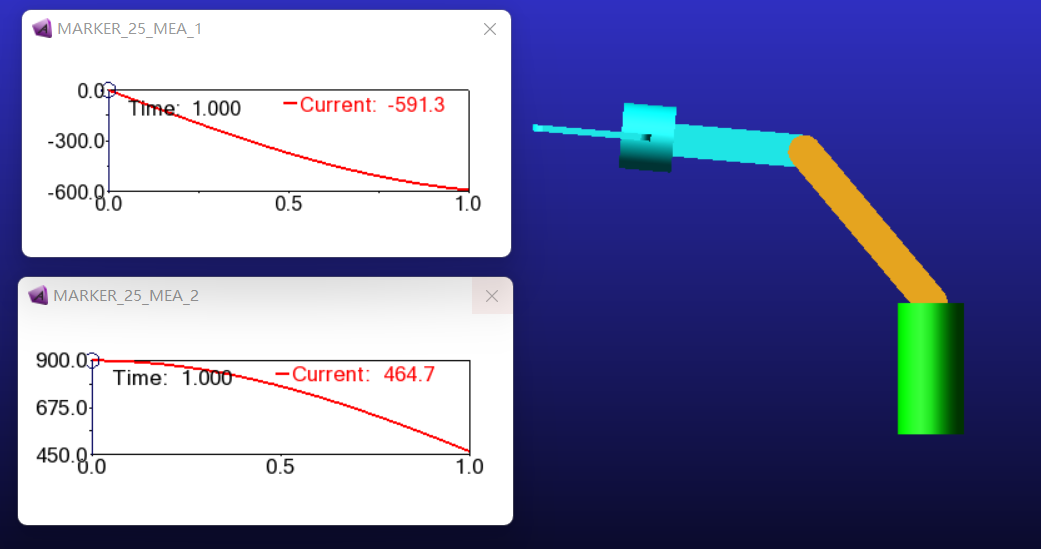
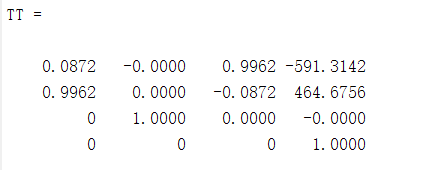
图6 θ1为40°,θ2为45°





 技术文档
技术文档
 推荐好文
推荐好文







 155-2731-8020
155-2731-8020