















































软件

产品


前言:一直对于六关节机械臂与simulink的联合仿真很感兴趣,但网上关于实际模型的机械臂联合仿真的 资料 很少,更别说六关节的联合仿真了,所以断断续续地经历了很久才做出,期间踩过不少的坑,实属不易,现将整个仿真过程记录与此,与大家分享。
Solidworks另存为.xmt_ txt格式 ,adams导入此文件,导入的时候坐标系选择局部坐标系,导入的机械臂模型如下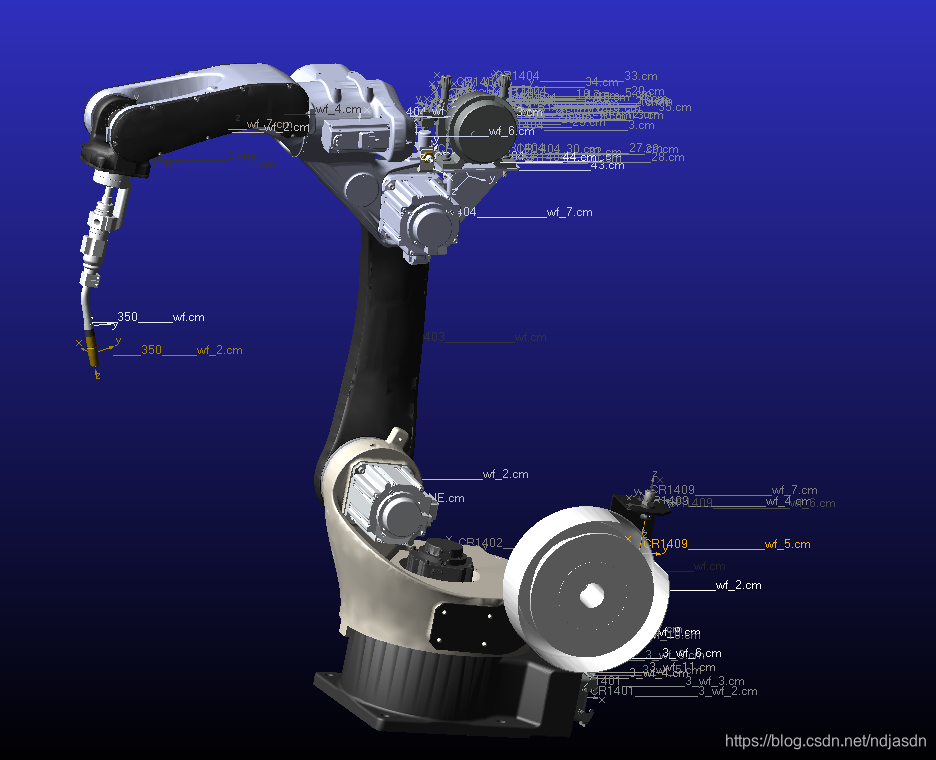

。
另外可以直接使用布尔操作,省去建立末端执行器固定副的繁琐操作。
在模型建立好之后,我们现在建立adams和simulink之间的接口变量,这里指的是输入输出变量。
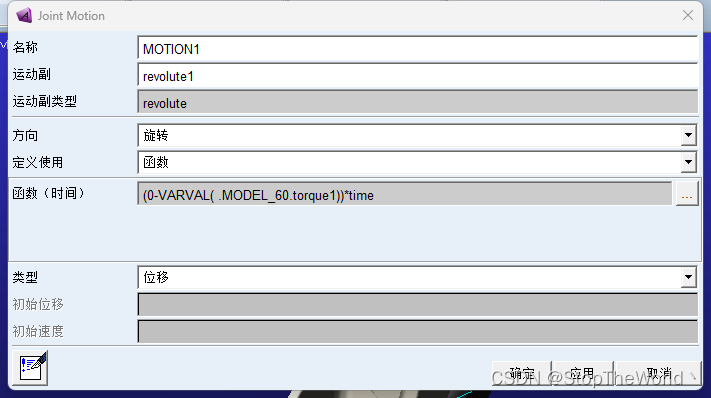
输入变量是指Matlab传给adams的变量(这里指关节力矩)
输出变量是指自己要测量的变量(这里指各个关节角和关节角度)
点击adams中的单元->x 建立状态变量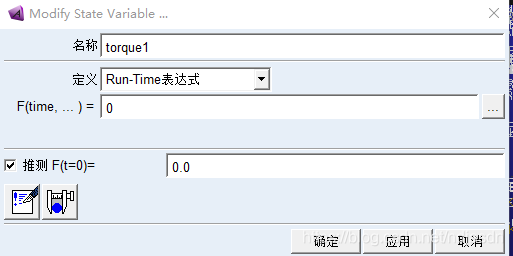
因为这里的力矩值是输入变量,所以设置为0,依次建立好6个力矩变量torque1 - torque6
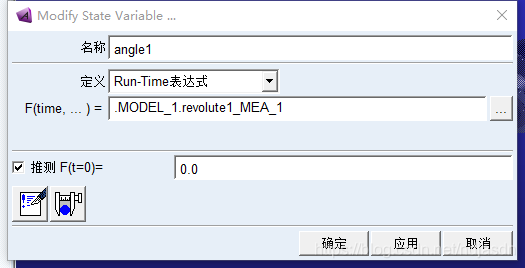
这里先将F表达式设置为0,后面再修改表达式。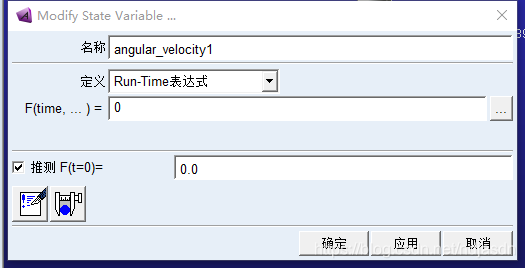
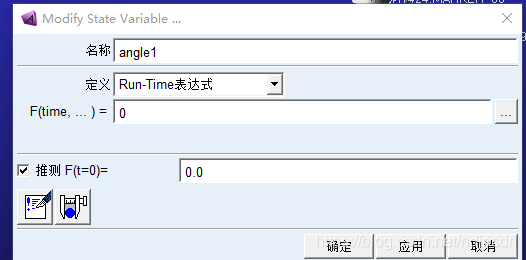
6个关节角变量的建立和6个关节角度变量的建立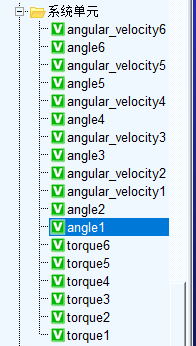
依次建立好12个状态变量angle1 - angle6 ,angular_velocity1 - angular_velocity6,此时他们的F表达式均暂时设置为0。
12组测量单位的建立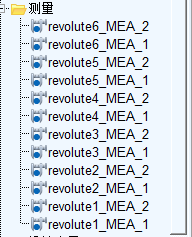
注:测量单位要选择正确,不然后面得到的数据会不正确,选择好了之后均要一一验证
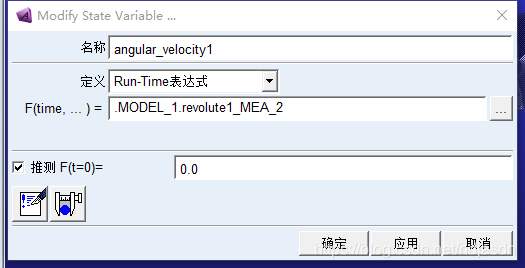
类 似地,建立好6个角度变量和角度测量的关联,6个角速度变量和角速度测量的关联、以及6个关节力矩的关联。至此,adams里的基本工作我们就完成了,没有的问题的话我们就可以建立联合仿真了。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















