















































软件

产品


配置说明:
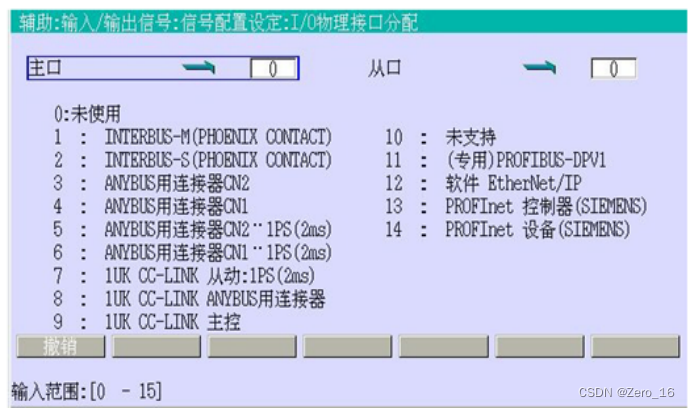
进入辅助=>6.输入/输出信号=>8.信号配置设定=>2.I/O物理接口分配菜单:填入IO物理接口分配。
在安装对应板卡的情况下,填入对应的端口号。
主口(机器人为主站)填入12,从口(机器人为从站)填入12。
不使用的情况下填0。
(2)通讯数据大小设置
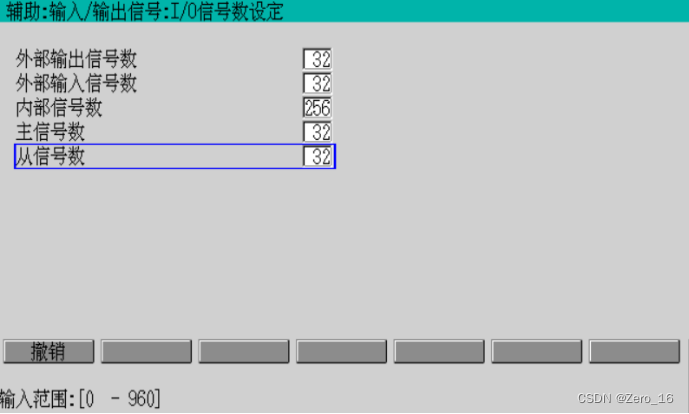
进入辅助=>6.输入/输出信号=>11.I/O信号数设定菜单
外部输入/输出信号数根据1TW板卡的数量来决定。1块板卡自带32位输入,32位输出(标配)。主/从信号数则代表着主站和从站需要设定的信号的位数。(最多960个)以主从各32位为例如下图
(3)EIP通讯数据与机器人IO绑定
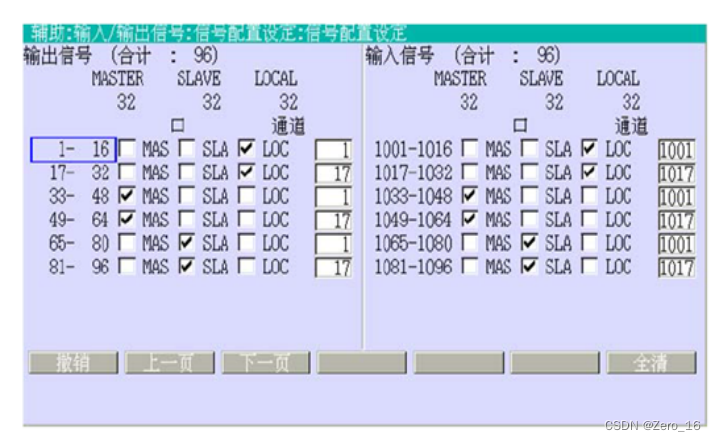
进入辅助=>6.输入/输出信号=>8.信号配置设定=>1.信号配置设定菜单
将AS应用信号号码按16点一组分配给IO接口,以本地IO(LOCAL)从站IO(SLAVE)主站IO(MASTER)的方法进行登记。
以主从本地各32位为例如下图,按对应的位数来登记信号配置。
图中所示为本地设定32位信号,主站设置32位信号,从站设置32位信号。
设置主/从/本地站时从1开始计数。
(4)EIP通讯IP设定
进入辅助=>6.输入/输出信号=>8.信号配置设定=>9.软件EtherNet/IP设定=>1.端口设定菜单
如图菜单更改IP地址和子网掩码,网关。

注意:机器人的IP需要和PLC的IP设置在同一网段内。
二 .PLC端配置
首先PLC端连接的网口IP地址和机器人连接网口必须在同一网段内。
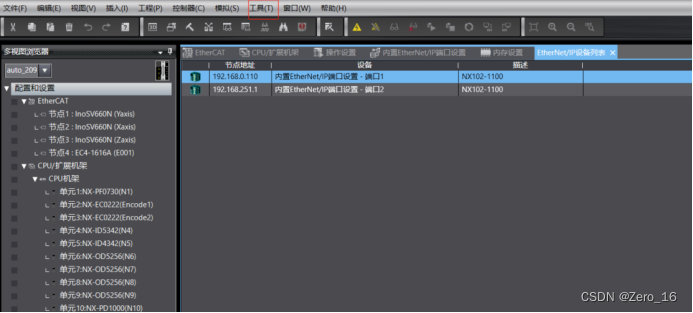
(1)设置PLC的IP地址
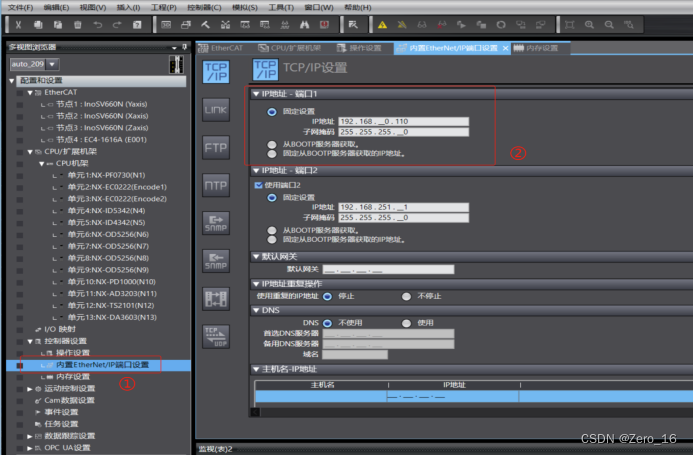
注意:首先的连接上PLC后才能改IP地址。
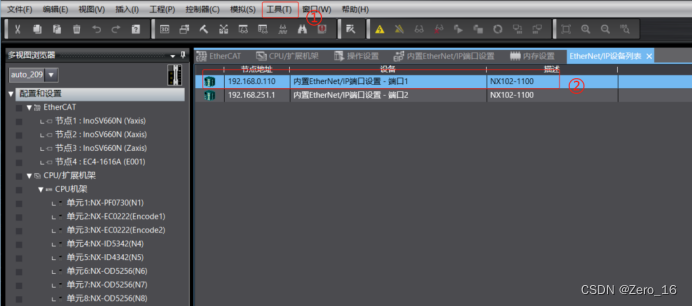
(2)EtherNet/IP设置
在工具菜单下---EtherNet/IP连接设置
(3)添加EDS文件
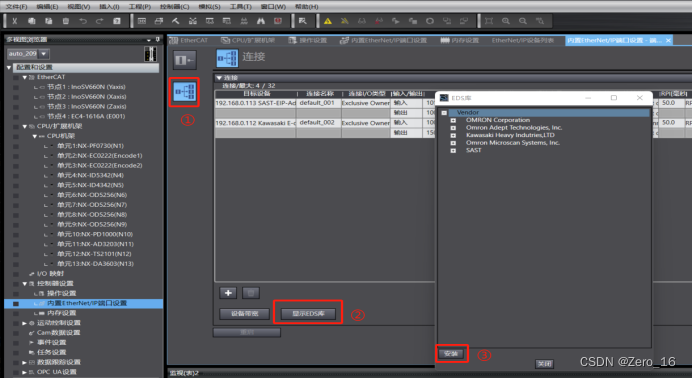
在第③步下找到相应的设备的EDS文件并添加。
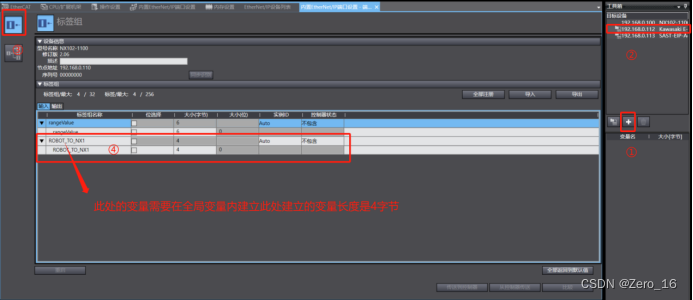
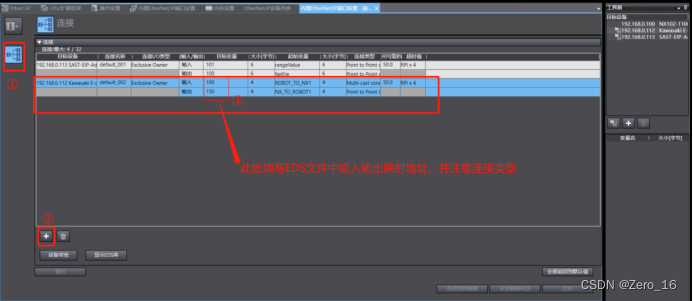
(4)机器人EDS文件说明

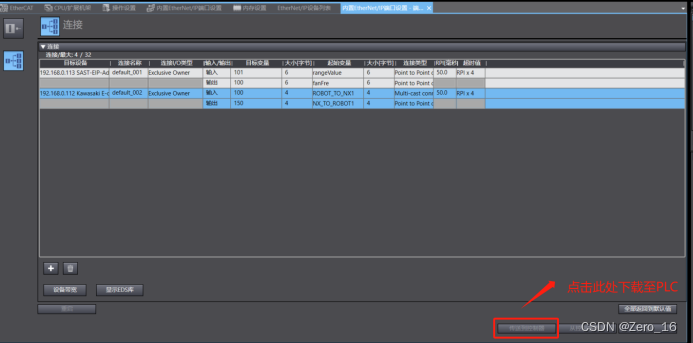
(5)EIP配置下载至PLC
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















