















































软件

产品


最近在搞adams与simulink联合 仿真 ,发现网上关于高自由度机械臂的建模与仿真中文资料很少,也没有开源模型。因此将我的学习成果开源出来,供大家学习和参考。做的效果不是很好,仍有许多不足之处。还请见谅。
https://github.com/zzy5510/adams_simulink_robotarm
所有代码、模型均放在以上仓库中。后续还会进行维护,开发其他控制算法,如自适应控制、最优控制等等。如果觉得做的不错,希望能帮忙点个star。
机械臂DH坐标图如下: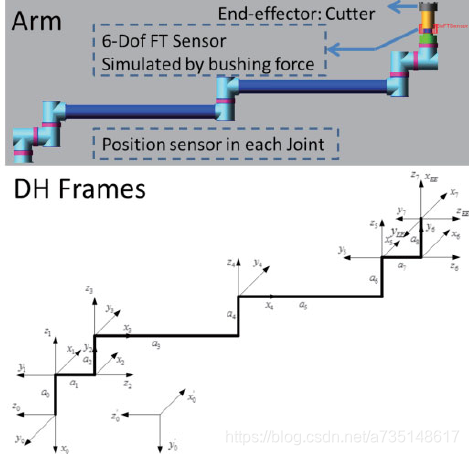
来自实验室杨师兄的论文《An Adaptive Force Control Method for 7-Dof Space Manipulator Repairing Malfunctioning Satellite 》。
按照此图在adams建立了机械臂模型: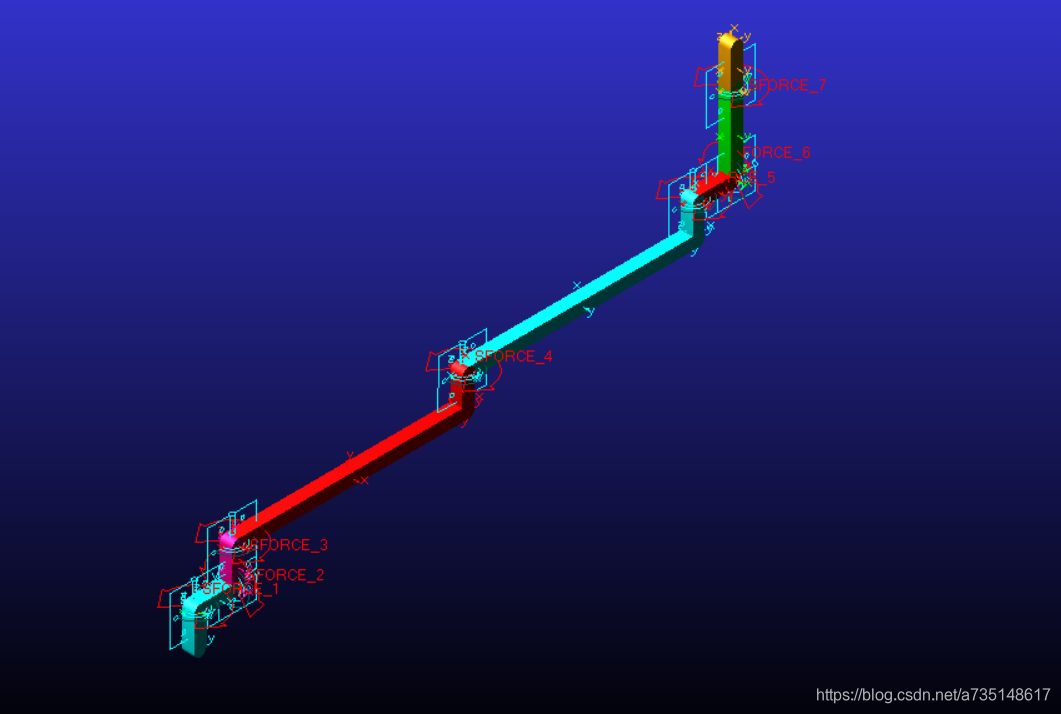
注意事项:为了方便逆动力学运算,对杆件的质量参数进行了简化,杆件1、3、4垂直于地面的一段质量设为0,使得杆件的质心位于水平段的中心。
PD控制被证明是稳定的。PD控制的数学原理和公式 推导如下:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















