















































软件

产品


课程目的
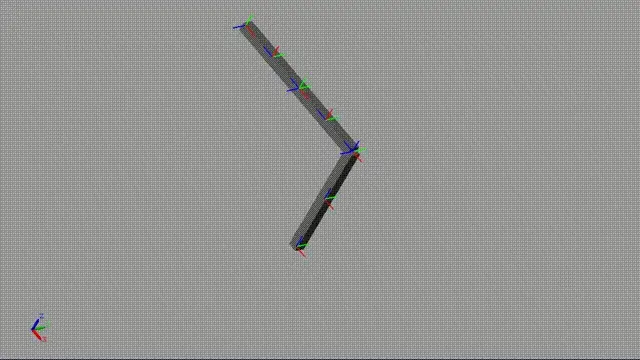
机械臂建模仿真,Simulink随着Matlab 的更新迭代,其界面、组件等功能也发生了较大的变化,而网络上的教程确还是较老版本,对于新手而言,往往面临着不知从何做起的局面,因此,本教程基于Matlab的R2019B版本,从基础的组件介绍讲起,教大家如何创建基于Matlab的机械臂可视化仿真系统。
可先试看5分钟~

课程内容
1. Simullink常用组件介绍
2. 机械臂模型搭建
3. 运动学仿真与轨迹规划
4. 机械臂模型自定义搭建
*课程资料请在微信公众号“古月居”后台回复“仿真控制资料”获取
温馨提示
1.适合机器人领域从业者初学者。
2.机械臂运动仿真、机械臂可视化等入门教程。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















