















































软件

产品


重磅干货,第一时间送达
一、人脸对齐介绍
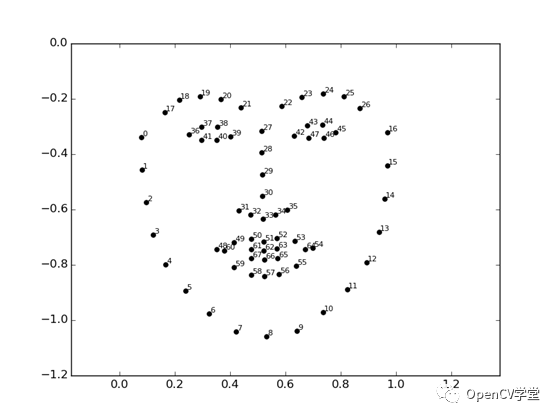
在人脸识别中有一个重要的预处理步骤-人脸对齐,该操作可以大幅度提高人脸识别的准确率与稳定性,但是早期的OpenCV版本不支持人脸Landmark检测,因此一般都是通过对人脸进行分割,然后通过角点检测来寻找眼睛两个角点,连线之后根据它们有水平线的角度,旋转实现人脸对齐之后在提取人脸区域,OpenCV3.x版本开始支持获取Landmark数据,最常见的Landmark数据就是人脸的68个标准点位,图示如下:
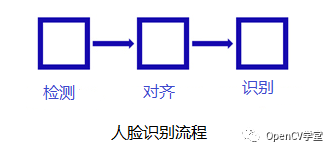
实现对齐主要是基于眼睛的位置,对人脸倾斜进行几何变换,实现人脸对齐操作,人脸对齐对提高人脸识别率特别重要,常见的人脸识别系统都会包含人脸对齐操作,举例如下:
二、人脸对齐代码实现
基于OpenCV实现人脸对齐主要分为如下几步
1.人脸检测器定义与Landmark检测
OpenCV中通过HAAR或者LBP特征实现了人脸检测,最新的OpenCV3.4基于残差网络也实现了人脸检测,相关的文章可以阅读:
有了人脸之后,我们就可以通过加载预训练的Landmark检测模型,实现Landmark检测,这里使用的模型是局部二值特征(LBF-Local Binary Feature)实现人脸68个点位的检测,这个也是2014年CVPR的一篇论文。最新的OpenCV3.4 Landmark检测器支持自定义人脸检测器设置,所以只要把我们上面的HAAR/LBP/残差人脸检测器设置过去就会自动检测人脸,然后发现Landmark数据。整个代码实现如下:
// 创建LBF landmark 检测器Ptr<FacemarkLBF> facemark = FacemarkLBF::create(params);facemark->setFaceDetector((FN_FaceDetector)myDetector, &face_cascade);// 加载模型数据facemark->loadModel("https://www.gofarlic.com/vcprojects/images/lbfmodel.yaml");cout << "Loaded model" << endl;// 开始检测printf("start to detect landmarks...\n");vector<Rect> faces;facemark->getFaces(img, faces);vector< vector<Point2f> > shapes;if (facemark->fit(img, faces, shapes)){ Point eye_left; // 36th Point eye_right; // 45th for (unsigned long i = 0; i<faces.size(); i++) { eye_left = shapes[i][36]; eye_right = shapes[i][45]; line(img, eye_left, eye_right, Scalar(255, 0, 0), 2, 8, 0); face_alignment(img(faces[i]), eye_left, eye_right, faces[i]); // 绘制人脸矩形区域 rectangle(img, faces[i], Scalar(255, 0, 0)); // 绘制人脸68个 landmark点位 for (unsigned long k = 0; k<shapes[i].size(); k++) cv::circle(img, shapes[i][k], 2, cv::Scalar(0, 0, 255), FILLED); } namedWindow("Detected_shape"); imshow("Detected_shape", img); waitKey(0);}2.Landmark数据处理
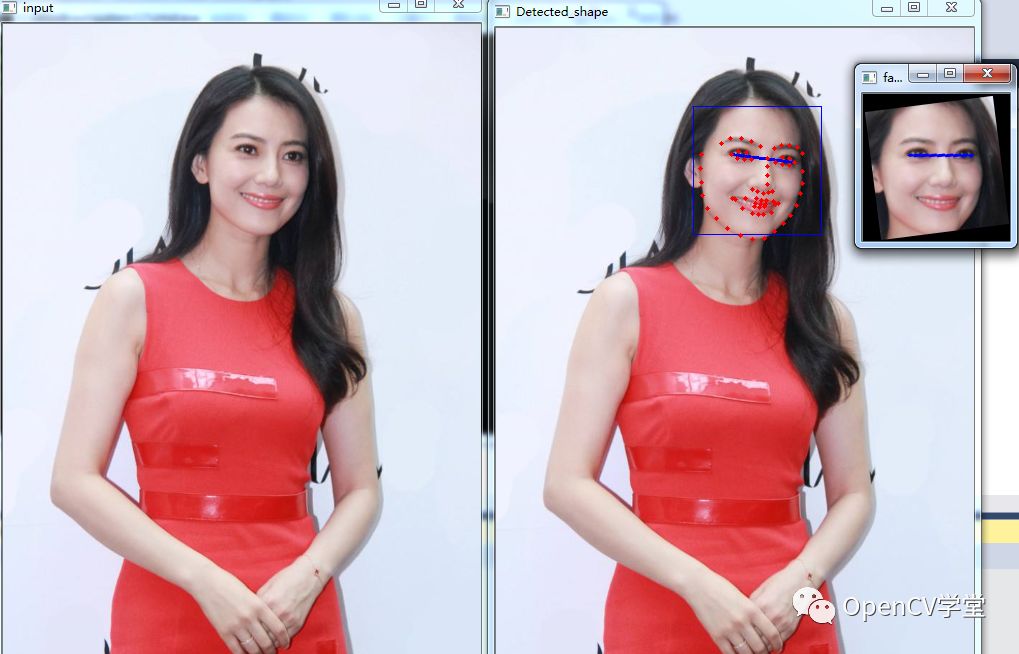
对Landmark数据提取获得眼睛位置坐标,这里我们获取的是36与45两个点坐标计算角度(参照第一张图),然后通过几何变换实现人脸对齐操作。代码如下:
int offsetx = roi.x;int offsety = roi.y;// 计算中心位置int cx = roi.width / 2;int cy = roi.height / 2;// 计算角度int dx = right.x - left.x;int dy = right.y - left.y;double degree = 180 * ((atan2(dy, dx)) / CV_PI);// 旋转矩阵计算Mat M = getRotationMatrix2D(Point2f(cx, cy), degree, 1.0);Point2f center(cx, cy);Rect bbox = RotatedRect(center, face.size(), degree).boundingRect();M.at<double>(0, 2) += (bbox.width / 2.0 - center.x);M.at<double>(1, 2) += (bbox.height / 2.0 - center.y);// 对齐Mat result;warpAffine(face, result, M, bbox.size());imshow("face-alignment", result);3.运行效果
完整的程序代码如下:
#include <opencv2/opencv.hpp>#include <opencv2/face.hpp>#include <math.h>#include <iostream>using namespace cv;using namespace cv::face;using namespace std;const String lbpfilePath = "https://www.gofarlic.com/opencv-3.4/opencv/build/etc/lbpcascades/lbpcascade_frontalface.xml";bool myDetector(InputArray image, OutputArray faces, CascadeClassifier *face_cascade);void face_alignment(Mat &face, Point left, Point right, Rect roi);int main(int argc, char** argv) { Mat img = imread("https://www.gofarlic.com/vcprojects/images/gaoyy.png"); namedWindow("input", CV_WINDOW_AUTOSIZE); imshow("input", img); CascadeClassifier face_cascade; face_cascade.load(lbpfilePath); FacemarkLBF::Params params; params.n_landmarks = 68; // 68个标注点 params.initShape_n = 10; params.stages_n = 5; // 算法的5个强化步骤 params.tree_n = 6; // 模型中每个标注点结构树 数目 params.tree_depth = 5; // 决策树深度 // 创建LBF landmark 检测器 Ptr<FacemarkLBF> facemark = FacemarkLBF::create(params); facemark->setFaceDetector((FN_FaceDetector)myDetector, &face_cascade); // 加载模型数据 facemark->loadModel("https://www.gofarlic.com/vcprojects/images/lbfmodel.yaml"); cout << "Loaded model" << endl; // 开始检测 printf("start to detect landmarks...\n"); vector<Rect> faces; facemark->getFaces(img, faces); vector< vector<Point2f> > shapes; if (facemark->fit(img, faces, shapes)) { Point eye_left; // 36th Point eye_right; // 45th for (unsigned long i = 0; i<faces.size(); i++) { eye_left = shapes[i][36]; eye_right = shapes[i][45]; line(img, eye_left, eye_right, Scalar(255, 0, 0), 2, 8, 0); face_alignment(img(faces[i]), eye_left, eye_right, faces[i]); // 绘制人脸矩形区域 rectangle(img, faces[i], Scalar(255, 0, 0)); // 绘制人脸68个 landmark点位 for (unsigned long k = 0; k<shapes[i].size(); k++) cv::circle(img, shapes[i][k], 2, cv::Scalar(0, 0, 255), FILLED); } namedWindow("Detected_shape"); imshow("Detected_shape", img); waitKey(0); } return 0;}bool myDetector(InputArray image, OutputArray faces, CascadeClassifier *face_cascade){ Mat gray; if (image.channels() > 1) cvtColor(image, gray, COLOR_BGR2GRAY); else gray = image.getMat().clone(); equalizeHist(gray, gray); std::vector<Rect> faces_; face_cascade->detectMultiScale(gray, faces_, 1.1, 1, CASCADE_SCALE_IMAGE, Size(50, 50)); Mat(faces_).copyTo(faces); return true;}void face_alignment(Mat &face, Point left, Point right, Rect roi) { int offsetx = roi.x; int offsety = roi.y; // 计算中心位置 int cx = roi.width / 2; int cy = roi.height / 2; // 计算角度 int dx = right.x - left.x; int dy = right.y - left.y; double degree = 180 * ((atan2(dy, dx)) / CV_PI); // 旋转矩阵计算 Mat M = getRotationMatrix2D(Point2f(cx, cy), degree, 1.0); Point2f center(cx, cy); Rect bbox = RotatedRect(center, face.size(), degree).boundingRect(); M.at<double>(0, 2) += (bbox.width / 2.0 - center.x); M.at<double>(1, 2) += (bbox.height / 2.0 - center.y); // 对齐 Mat result; warpAffine(face, result, M, bbox.size()); imshow("face-alignment", result);}下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















