















































软件

产品


参考:FaceDetector/face_align.ipynb at master · faciallab/FaceDetector · GitHub
import cv2import matplotlib.pyplot as pltimport numpy as np img_file = '../tests/asset/images/roate.jpg'img = cv2.imread(img_file)img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)plt.figure(figsize=(10, 10))plt.imshow(img)plt.show()
import mtcnnfrom mtcnn.utils import draw # First we create pnet, rnet, onet, and load weights from caffe model.pnet, rnet, onet = mtcnn.get_net_caffe('../output/converted') # Then we create a detectordetector = mtcnn.FaceDetector(pnet, rnet, onet, device='cpu') img = cv2.imread(img_file)boxes, landmarks = detector.detect(img, minsize=24)face = draw.crop(img, boxes=boxes, landmarks=landmarks)[0]face = cv2.cvtColor(face, cv2.COLOR_RGB2BGR)plt.figure(figsize=(5, 5))plt.imshow(face)plt.show()
How can we get the transform matrix.
首先假设我们最后要截取一张(112,96)大小的正脸,那么人脸的五个关键点分别在什么位置才算是正脸呢?所以我们需要五个参考点
# Define the correct points.REFERENCE_FACIAL_POINTS = np.array([ [30.29459953, 51.69630051], [65.53179932, 51.50139999], [48.02519989, 71.73660278], [33.54930115, 92.3655014], [62.72990036, 92.20410156]], np.float32) # Lets create a empty image|empty_img = np.zeros((112,96,3), np.uint8) draw.draw_landmarks(empty_img, REFERENCE_FACIAL_POINTS.astype(int)) plt.figure(figsize=(5, 5))plt.imshow(empty_img)plt.show()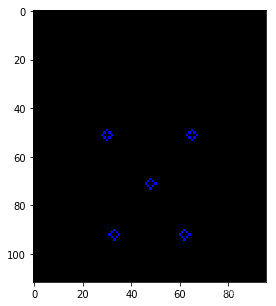
那么这些特征点在我们图片中的人脸什么位置呢
img_copy = img.copy()landmark = landmarks[0] img_copy[:112, :96, :] = empty_imgimg_copy = cv2.cvtColor(img_copy, cv2.COLOR_RGB2BGR)draw.draw_landmarks(img_copy, landmark) plt.figure(figsize=(15, 15))plt.imshow(img_copy)plt.show() 
我们知道三个参考点可以决定一个变换矩阵,选取一双眼睛对应的两个点和鼻子对应的一个点共的三个点计算变换矩阵,可以通过cv2.getAffineTransform 仿射变换函数获得变换矩阵。仿射变换参考这篇文章.
trans_matrix = cv2.getAffineTransform(landmark[:3].cpu().numpy().astype(np.float32), REFERENCE_FACIAL_POINTS[:3]) Next step, apply transformation to origin image and crop the interested region.
aligned_face = cv2.warpAffine(img.copy(), trans_matrix, (112, 112))aligned_face = cv2.cvtColor(aligned_face, cv2.COLOR_RGB2BGR) plt.figure(figsize=(5, 5))plt.imshow(aligned_face)plt.show() 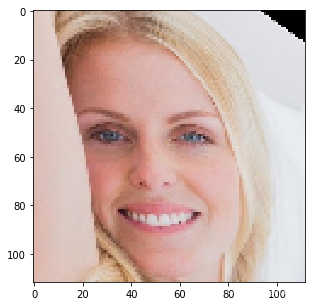
人脸已经被大致对齐了,但是效果似乎不是很理想,人脸有一些变形
上面这个简单的算法有几个问题。一是我们有5个点的对应关系,却只用了三个。二是上述操作可能会造成对图像的剪切拉伸变换,这样会使图像变形。怎么解决这个问题呢
首先我们先来回顾一下怎样做一个仿射变换
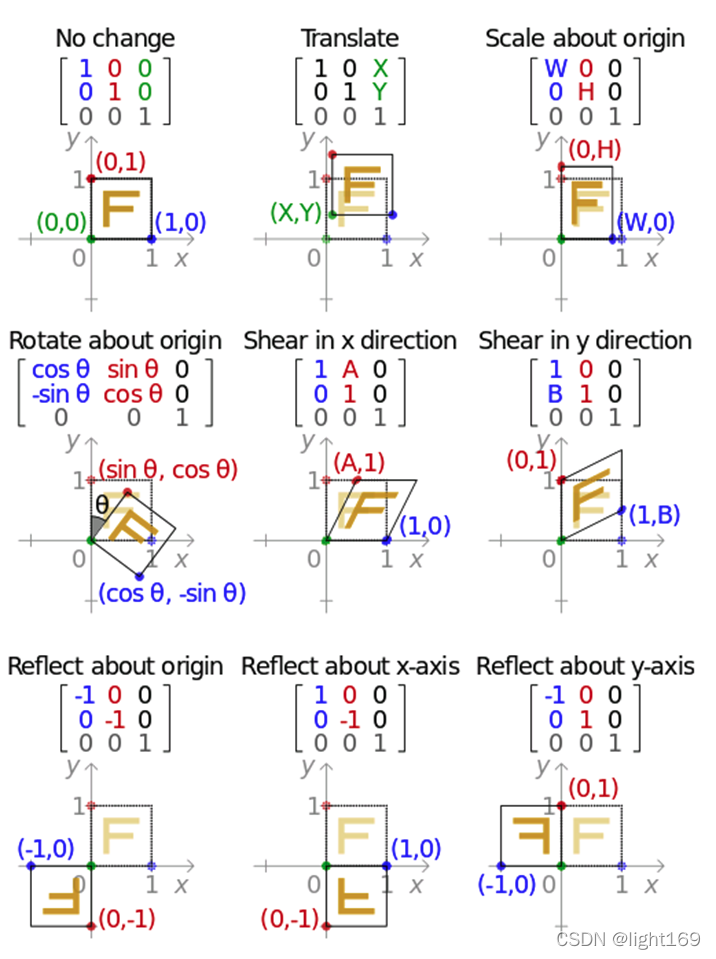
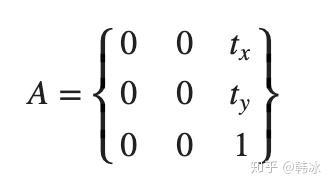
如果我们想对一个图像在x轴方向平移 tx 个像素,在y轴方向平移ty个像素,我们的变换矩阵长什么样子呢?
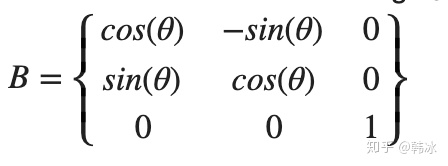
如果我们想顺时针旋转一定角度呢
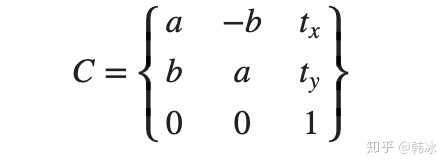
同时平移和旋转()呢
给定一个点,经过mctnn转换为对应的点
,因此我们需要一个最优的参数(
)满足
,如何解下面这个方程呢?
这是一个线性方程,我们用Least Squares Method(最小二乘法)来求解五个点的最优估计:
(可以用numpy的内置函数 numpy.linalg.lstsq)
from numpy.linalg import inv, norm, lstsqfrom numpy.linalg import matrix_rank as rank def findNonreflectiveSimilarity(uv, xy, K=2): M = xy.shape[0] x = xy[:, 0].reshape((-1, 1)) # use reshape to keep a column vector y = xy[:, 1].reshape((-1, 1)) # use reshape to keep a column vector tmp1 = np.hstack((x, y, np.ones((M, 1)), np.zeros((M, 1)))) tmp2 = np.hstack((y, -x, np.zeros((M, 1)), np.ones((M, 1)))) X = np.vstack((tmp1, tmp2)) u = uv[:, 0].reshape((-1, 1)) # use reshape to keep a column vector v = uv[:, 1].reshape((-1, 1)) # use reshape to keep a column vector U = np.vstack((u, v)) # We know that X * r = U if rank(X) >= 2 * K: r, _, _, _ = lstsq(X, U) r = np.squeeze(r) else: raise Exception('cp2tform:twoUniquePointsReq') sc = r[0] ss = r[1] tx = r[2] ty = r[3] Tinv = np.array([ [sc, -ss, 0], [ss, sc, 0], [tx, ty, 1] ]) T = inv(Tinv) T[:, 2] = np.array([0, 0, 1]) T = T[:, 0:2].T return T similar_trans_matrix = findNonreflectiveSimilarity(landmark.cpu().numpy().astype(np.float32), REFERENCE_FACIAL_POINTS) aligned_face = cv2.warpAffine(img.copy(), similar_trans_matrix, (112, 112))aligned_face = cv2.cvtColor(aligned_face, cv2.COLOR_RGB2BGR) plt.figure(figsize=(5, 5))plt.imshow(aligned_face)plt.show()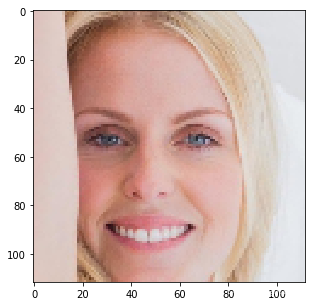
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















