















































软件

产品


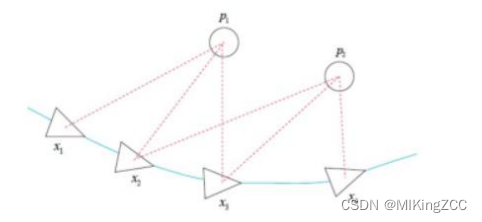
考虑到位姿 i i i处对路标 j j j的一次观测 z i j z_{ij} zij:
e i j = Z i j − h ( x i , y j ) e_{ij}=Z_{ij}-h(x_i,y_j) eij=Zij−h(xi,yj)
我们根据Gauss-Newton 或 L-M 非 线性 优化方法,最终我们需要求解一个 H Δ x = b H\Delta x=b HΔx=b形式的方程。其中 𝐻 = J T J 𝐻 = J^TJ H=JTJ 为一个稀疏 矩阵 ;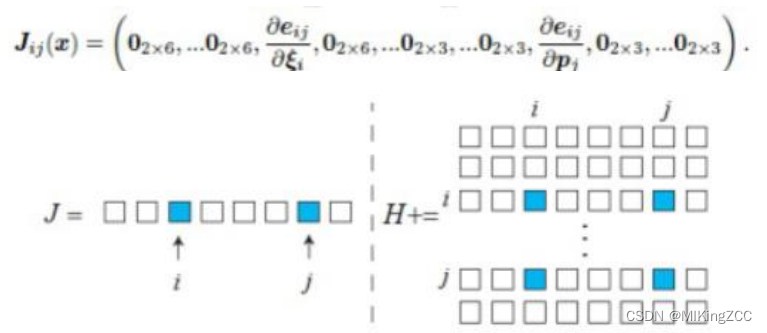
考虑多个位姿和路标的情况: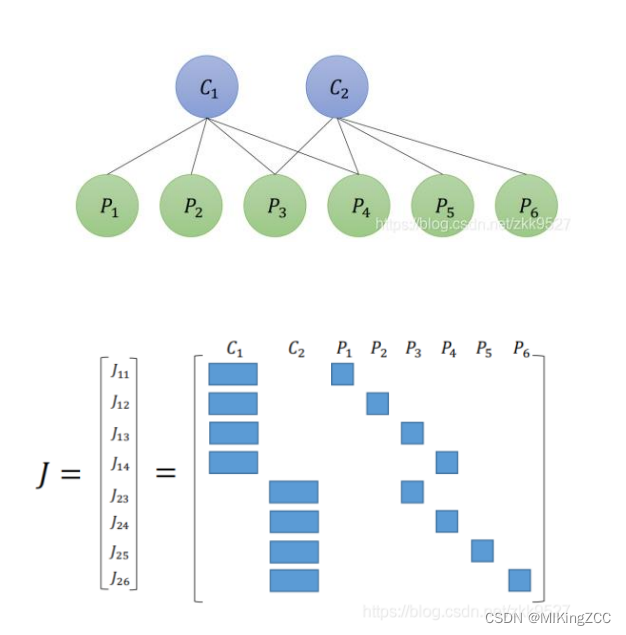
所以 H H H的表示为: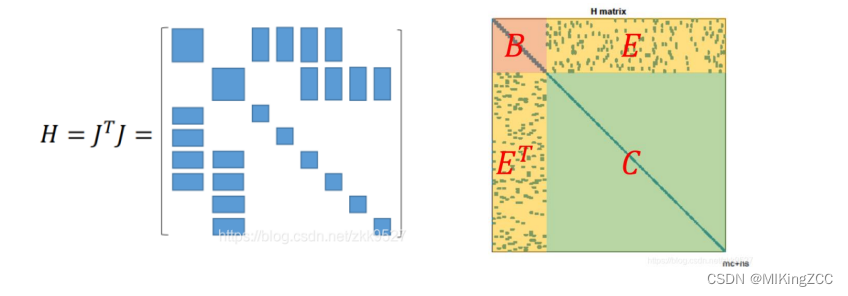
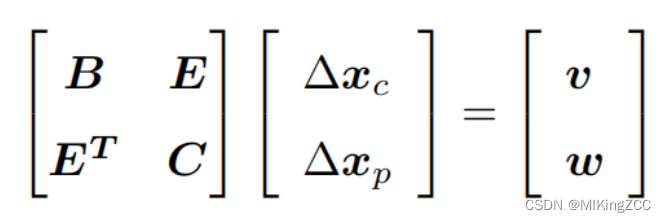
求解 H Δ x = b H\Delta x=b HΔx=b方程可以表示为:
利用舒尔补消元计算 Δ x c \Delta x_c Δxc: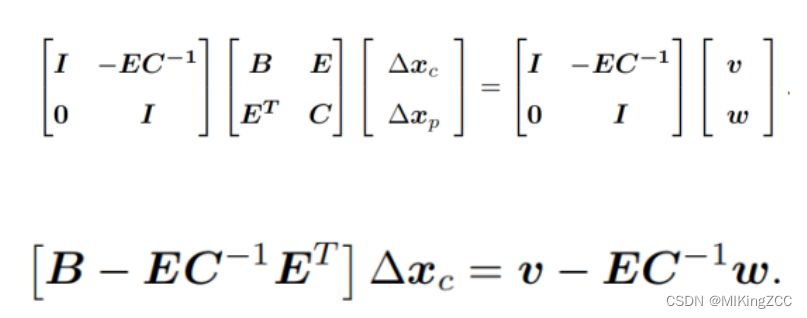
然后把解得的 Δ x c \Delta x_c Δxc代入到原方程,然后求解 Δ x p \Delta x_p Δxp。
相比于直接解线性方程的做法,它的优势在于:
图优化是把位姿和空间点一起,进行优化。随着轨迹越走越长,特征点的增长也很快。因此位姿图优化的意义在于:再优化几次以后把特征点固定住不再优化,只当作 位姿估计 的约束,之后主要优化位姿;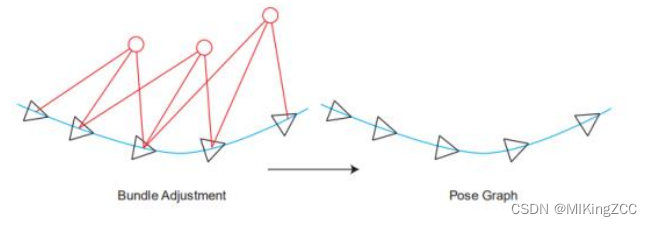
在基于图优化激 光 SLAM 中,可以看作在激光里程计部分是不断累积图中的节点(位姿) 和边(位姿变换关系);在后端优化部分通过构建图来最小化位姿之间的误差;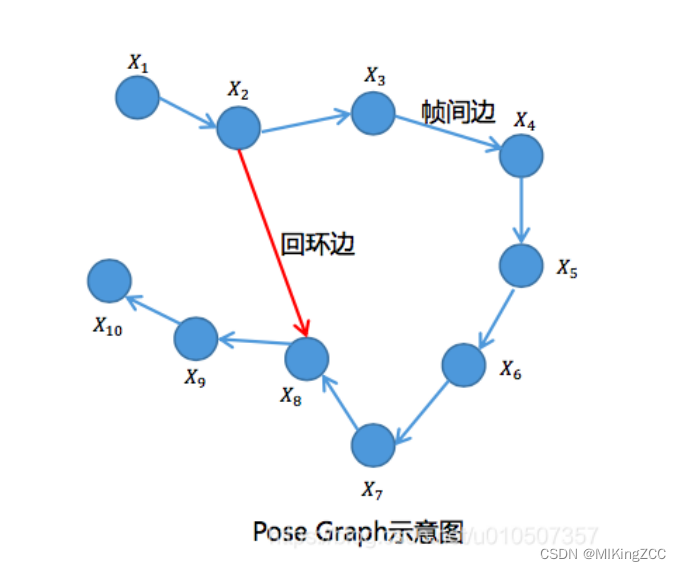
因子图中,圆圈表示待优化的变量,如位姿;红框表示一次观测,蓝框表示一次运动;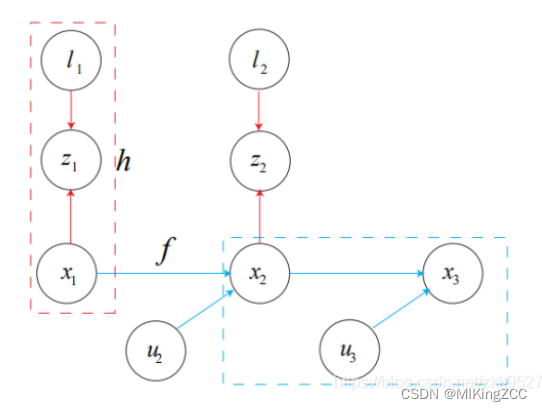
蓝色框可以表示为:
P ( x 3 ∣ x 2 , u 3 ) P(x_3|x_2,u_3) P(x3∣x2,u3)
红色框可以表示为:
P ( z 1 ∣ x 1 , l 1 ) P(z_1|x_1,l_1) P(z1∣x1,l1)
所以因子图 模型 可以表示为:
{ x , l } ∗ = a r g m a x ( x 0 ) ∏ P ( x k ∣ x k − 1 , u k ) ∏ P ( z k ∣ x i , l j ) \{x,l\}^*=arg max(x_0)\prod P(x_k|x_{k-1},u_k) \prod P(z_k|x_{i},l_j) {x,l}∗=argmax(x0)∏P(xk∣xk−1,uk)∏P(zk∣xi,lj)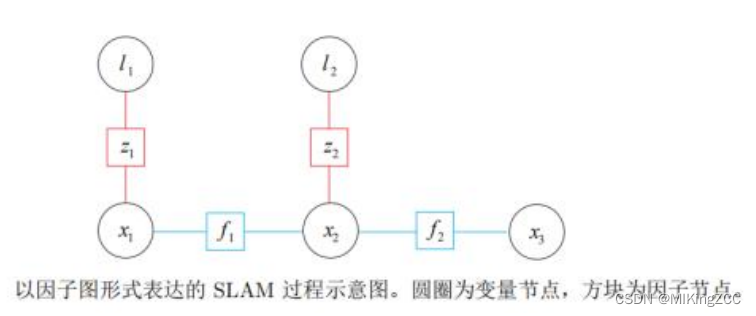
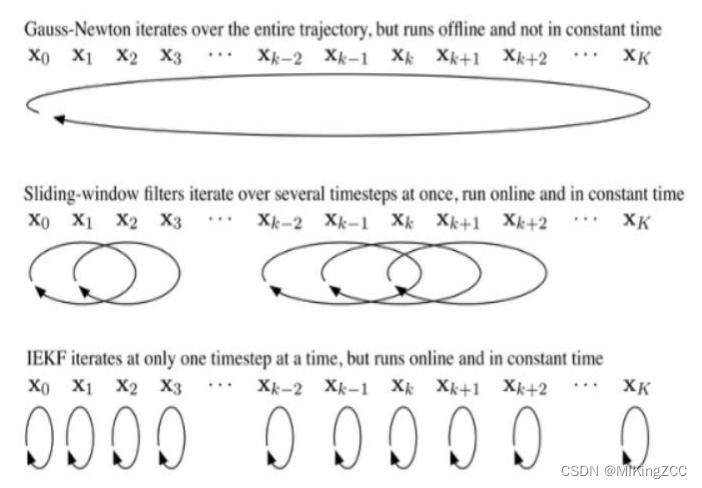
因子图是增量的处理后端优化,每加入一个节点,普通图优化是对整个图进行优化。因子图相当于保留中间结果,每加入一个点,对不需要重新计算的就直接用之前的中间结果,对需要重新计算的再去计算。
滤波的特点:
图优化方法:
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















