















































软件

产品


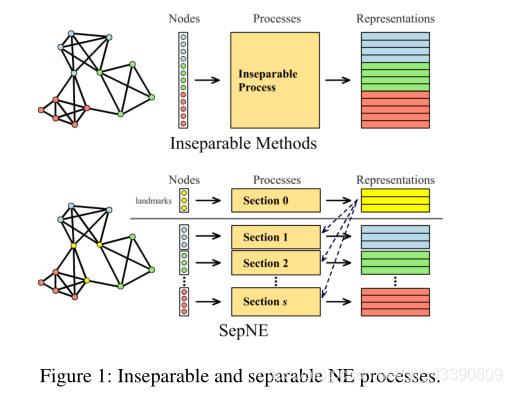
在大规模网络上,人们已经提出了许多成功的低维表示学习方法,而现有的方法几乎都是在不可分割的过程中设计的,即使只有一小部分节点感兴趣,也可以学习整个网络的嵌入。这会带来极大的不便,特别是在超大或动态网络上,这些方法几乎不可能实现。本文对分离矩阵分解问题进行了形式化描述,在此基础上提出了一种新的既能保持局部 信息 又能保持全局信息的目标函数。我们进一步提出了一种简单灵活的网络嵌入算法SepNE,它可以独立地学习分离过程中不同节点子集的表示。通过实现可分离性,减少了嵌入无关节点的不可继承性,产生了对超大网络的可扩展性,在分布式学习中的自动实现和进一步的适应性。
能否在保留整个网络信息的同时,分别学习与总体相比非常小的不同节点子集的表示?
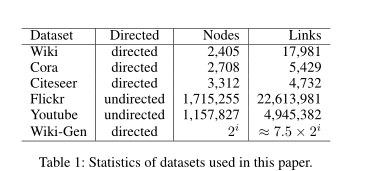
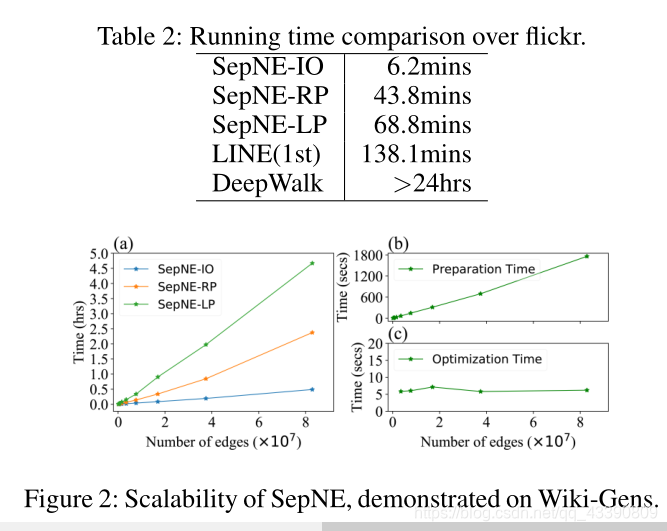
主要解决大规模网络的嵌入效率问题(百万级别的数个小时。十亿级别的上千个小时,这是不可以接受的)
本文在基于矩阵分解(后面记录)的框架下实现了NE问题的可分离性。
给定一个矩阵M,矩阵因子分解(MF)的目标是找到两个矩阵W和C都满足给定的约束条件,并使重建M时的残差最小化(M′'′=WT^TTC)。用公式表示:
在一个具有n个节点的图嵌入任务中,M的大小为n×n。M的值为节点之间的相近程度,可以用多种度量定义(边的权重、连接关系等等)
给定一个网络G = (V,E),丨V丨=n,邻近矩阵M,和一个分区设置f:V→V ’,V ’={V1,···,Vs}作为输入,任务是得到相应的W和C矩阵表示——(W1,····,Ws)和(C1,···,Cs)为了重构最优的M(损失同公式(1)一样)。
分区限制
给定顶点Vi_ii,在M中,只将Mi_iij_jj和Mj_jji_ii分在一起。
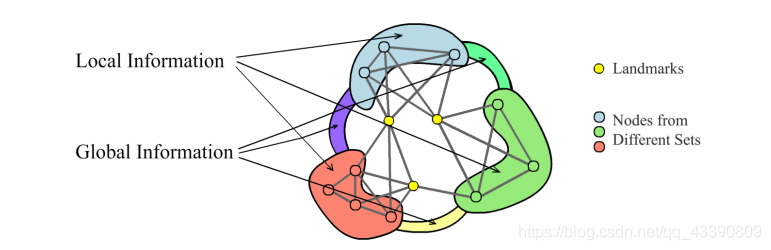
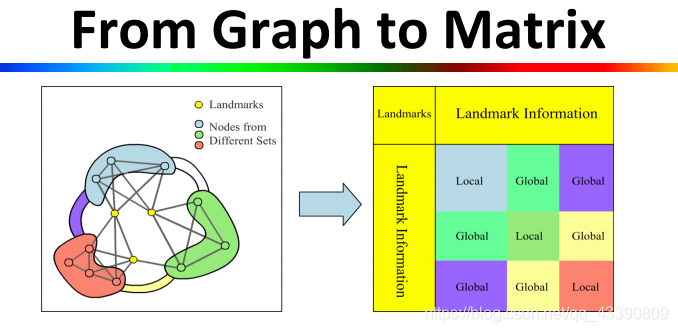
局部信息是指每个集合内或对角上的子矩阵的邻近度。
目的:给定节点集中的邻近度
建模SMF
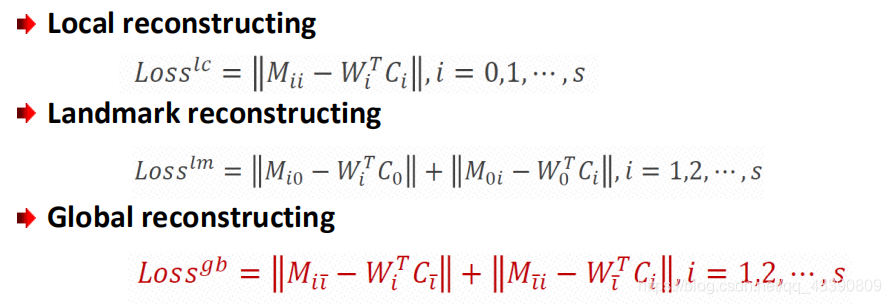
通过分解对角线上的s矩阵,只保留局部信息:
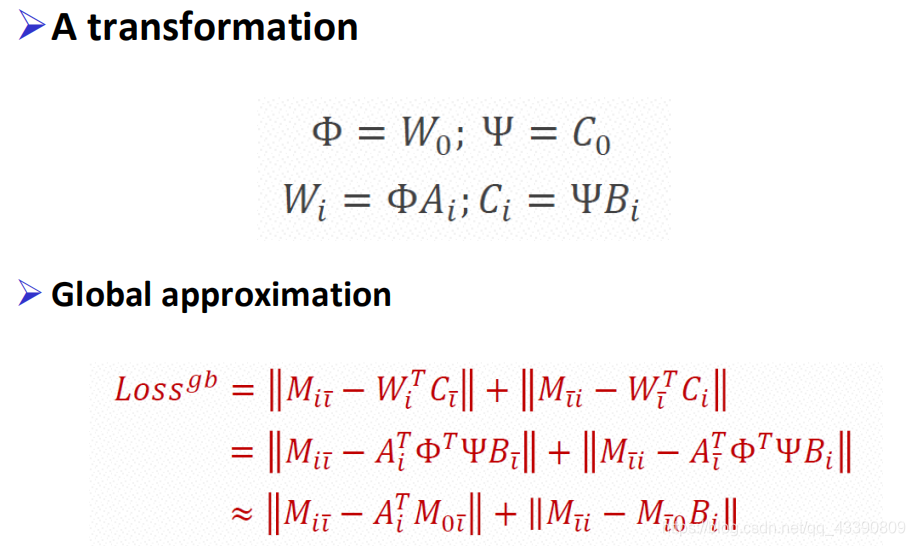
Landmark信息表示子集和手动建立的路标之间的距离,Landmark是一组特殊的节点(表示为V0_00),被选作为不同子集的参考。
目的:给定节点集与所选地标之间的接近度
分两个阶段求解: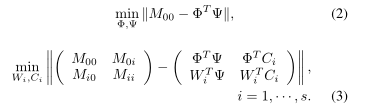
第一个阶段(2)嵌入地标(W0_00=Φ,C0_00=ψ),
第二阶段通过求解公式(3)得到剩余集的表示,并计算出Φ和ψ。
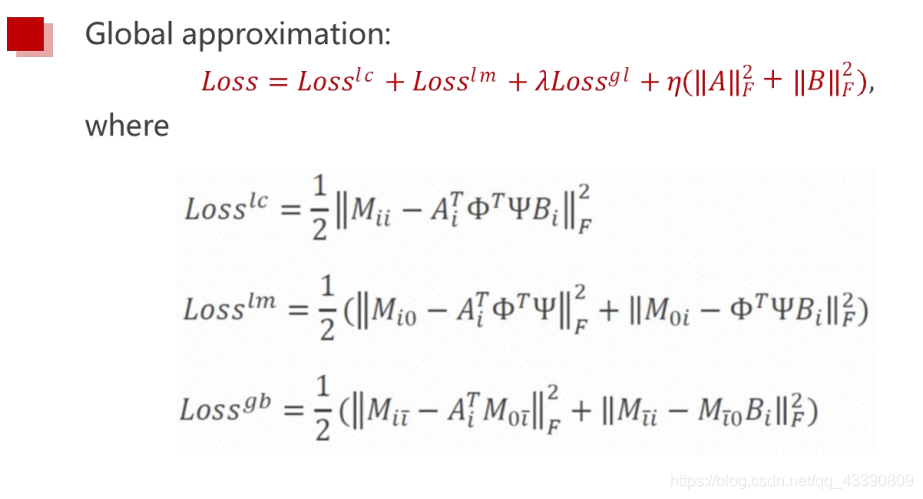
(3)中的损失可以明确分解为局部损失和地标损失,如下所示 、
、
目的:两个给定节点集之间的接近度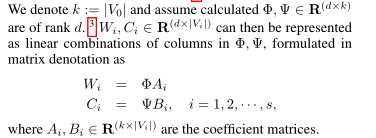
全局信息:
损失:
正则化:
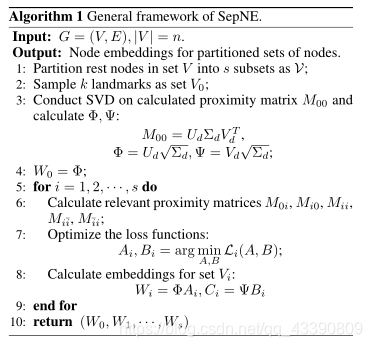
贪心算法
使用GDS,首先使用节点的度数形成一个最大堆,并将landmark集初始化为空。初始化后,GDS迭代检查堆的顶部。如果被当前地标集控制,则只需移除顶部,否则添加到集合中,然后移除。这个过程一直持续到堆为空或大小达到k。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















