















































软件

产品


Review how to add input and output in ADAMS.
| Elements/System Elements(add input) | Result |
|---|---|
  |  |
Then we would like to add output.
15 output
| definition | varible | definition | varible |
|---|---|---|---|
| A13 position | x,y | passive joint | q12q22q13q_{12}\quad q_{22} \quad q_{13}q12q22q13 |
| A13 velocity | xd,yd | passive joint velocity | q˙12q˙22q˙13\dot q_{12} \quad \dot q_{22} \quad \dot q_{13}q˙12q˙22q˙13 |
| A13 acceleration | xdd,ydd | passive joint acceleration | q¨12q¨22q¨13\ddot q_{12} \quad \ddot q_{22} \quad \ddot q_{13}q¨12q¨22q¨13 |
I just use all the output along x to show how I define the output,the same as the output along y.
| A13 position | A13 velocity | A13 acceleration |
|---|---|---|
 |  |  |
Then I parameterized the motion of the actuators ( joint q11and joint q21).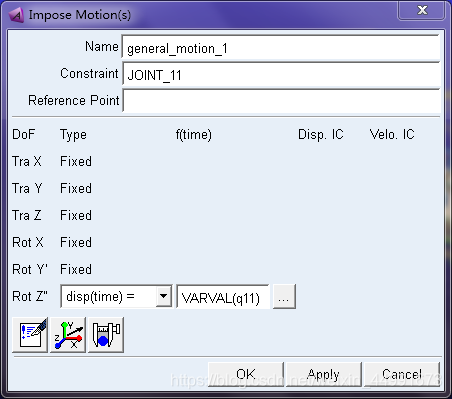
I would like to make sure whether I define output:passive angles rightly ,I selected elements/create a variable,then I use displacement -angle about z-AZ(Upper_Arm_1.MARKER_joint_12, Lower_Arm_1.MARKER_joint_12).I am not sure whether I selected the right marker.
Whether it is right or not. We have created 15 outputs.
We have created 15 outputs.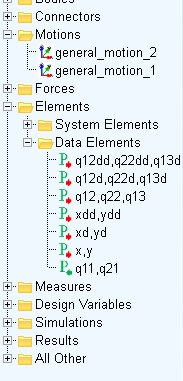
Plugins/Controls and select Plant export and specify
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















