















































软件

产品


现在开始正式的进行软件学习,首先我没有进行M语言的学习,先开始进行simulink的学习,众所周知,运动控制都离不开电机,所以,第一个任务就是进行电机的仿真模型搭建,我们先从最小电机系统开始,我学习使用的版本是Matlab R2015b。
首先新建一个simulink model文件添加DC Machine(直流电机),这个组件可能是我们以后接触的最多的组件之一,下面重点介绍下这个组件的详细情况。
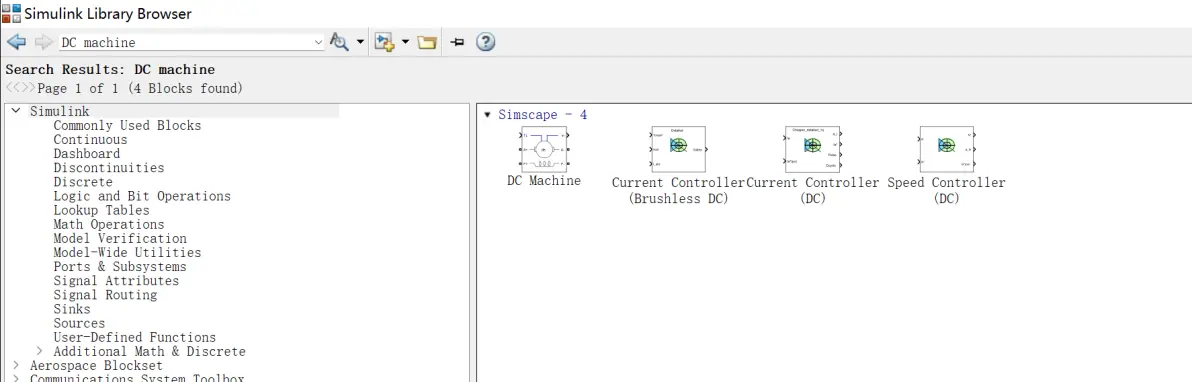
DC Machine
将组件加入到工程中后,双击组件可以看到三个选项,下面我对其主要配置进行描述:
由于我们后面要使用PID三环控制,所以这里我选择了力矩输入,因为力矩与电流成正比,方便我们后期的使用,磁场类型选择了永磁类型
2.parameters(参数)
首先对参数进行说明:
Ra、La:电枢电阻、电感
Laf:电枢与励磁回路互感
J:电机转动惯量
Bm:粘滞摩擦系数
Tf:静摩擦转矩
这里我把电机先当成理想电机BM TF都设置成0,初始电流和初始速度也都设置成0。
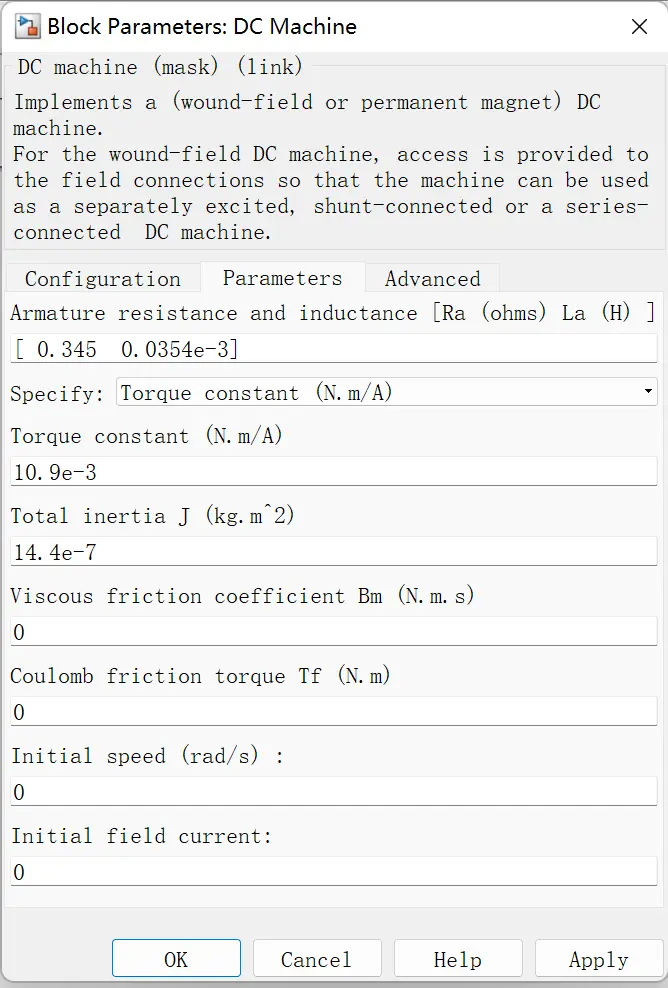
具体的参数配置
3.advanced(高级)
这里选择默认参数不去动。
在模型中增加电源和powergui,然后增加输出显示,这样能更直观的看到仿真数据,具体工程完成如图所示。
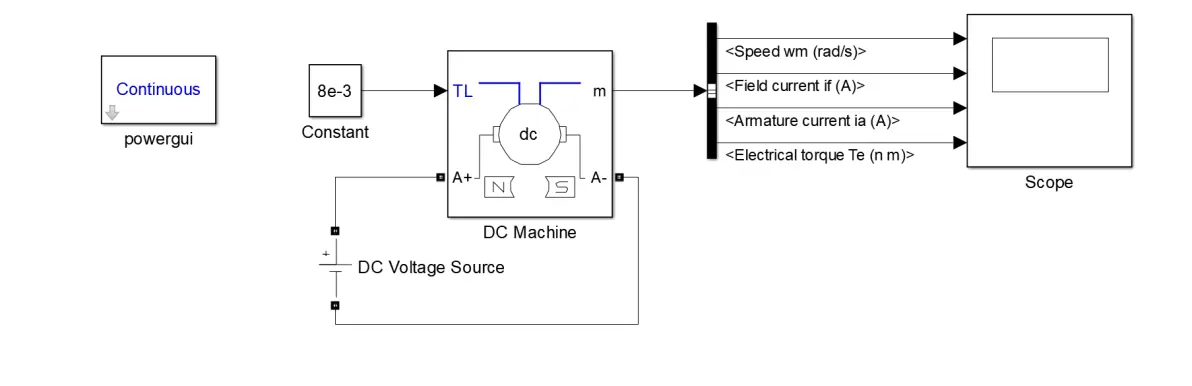
最小电机系统
设定好力矩参数后,开始进行仿真,结果如图。

仿真结果
实验完成,仿真结果和预计基本符合预期,对于matlab和simulink的仿真第一小步算是完成了,很多内容还比较糊涂,希望进一步学习中把不清楚的地方搞懂。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















