















































软件

产品


你搜这个,八成是在纠结:Jetson Xavier NX 放到 2026 年还值不值得买来做边缘 AI 推理? 我直接给结论——如果你跑 YOLOv8/v11、TensorRT、轻量视觉 SLAM,它依然很香。16GB 版本 CPU 跑分接近 i5-7300U,GPU 约 21 TOPS (INT8),功耗锁 15W 时性价比吊打同价位 x86 + 低端独显盒子。
我上个月刚拿它给产线做 多路 1080p + YOLOv11n INT8 实时检测,JetPack 6.2(2026.3 发布),说说真实感受。
NX 有两个版本,2026 年市面上基本只剩 16GB eMMC/ NVMe 版值得碰:
YOLOv11n 经 TensorRT FP16,输入 640×640:
15W 模式下被动散热勉强,密闭电箱里夏天下午能撞温墙降频。
我给它加了个 4cm 5V 涡轮风扇 + 铝鳍片,结温压在 65℃ 内。
电源建议 5V 4A 以上稳定源,便宜 USB-C 头载启动容易暗屏重启——我踩过这坑,别省。
✅ 边缘视觉检测(AOI、物流分拣、安防结构化分析)
✅ 机器人车载感知(无人叉车 / AGV 前置避障)
✅ 教学 / 原型验证 TensorRT 工作流
❌ 大模型 LLM / SAM(显存炸,哪怕 INT4 也憋屈)
❌ 重编译型 CI 构建机
❌ 多路 4K 并行不做裁剪直接怼
买就买 16GB + 官方载板或第三方工规载板(如 Aetina / Advantech 2026 款),eMMC 烧录 JetPack 6.2 后换 NVMe 启动。
开发阶段用 host PC 交叉编译 / Docker,别在 NX 上 apt-get install torch 源码编译——等到天荒地老。
后面有空写写 NX 上 TensorRT YOLOv11 完整量化踩坑记录 + 四路 CSI 摄像头同步采图配置,感兴趣留个言。
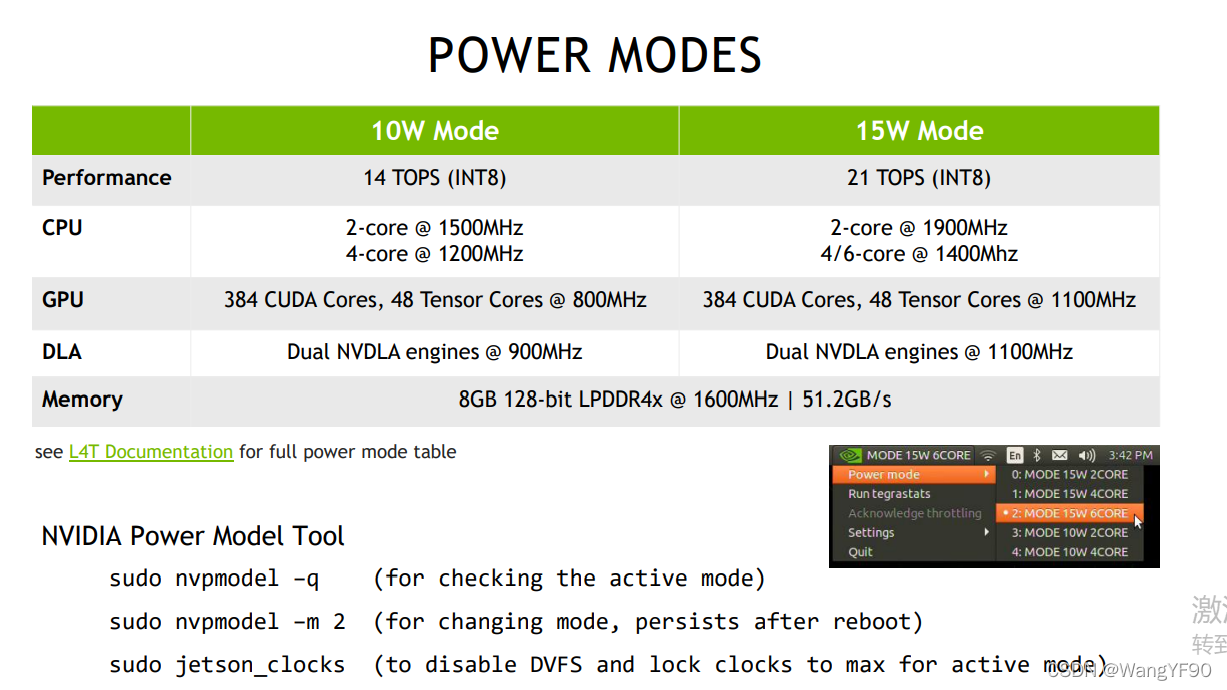
NX 的各个工作模式及功耗:
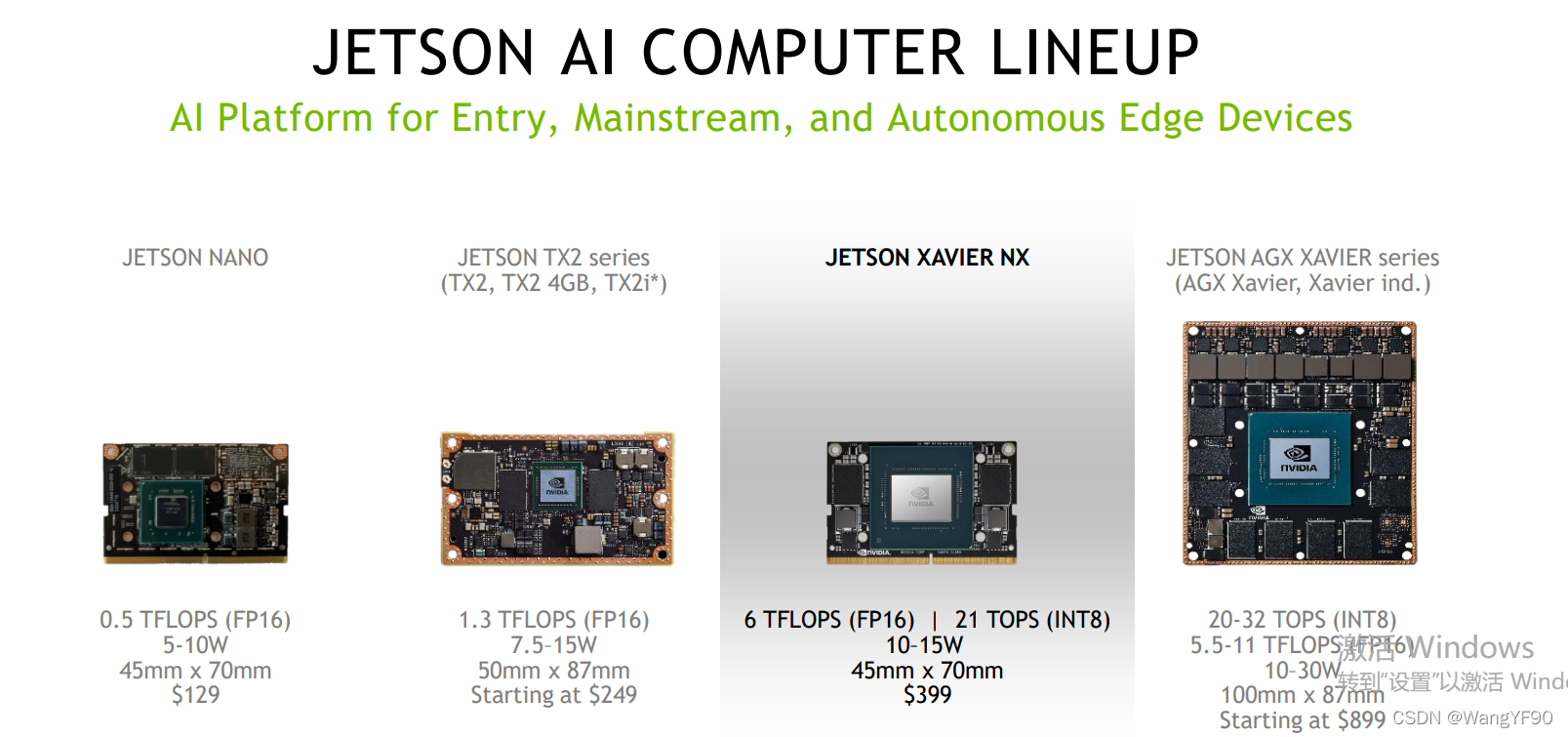
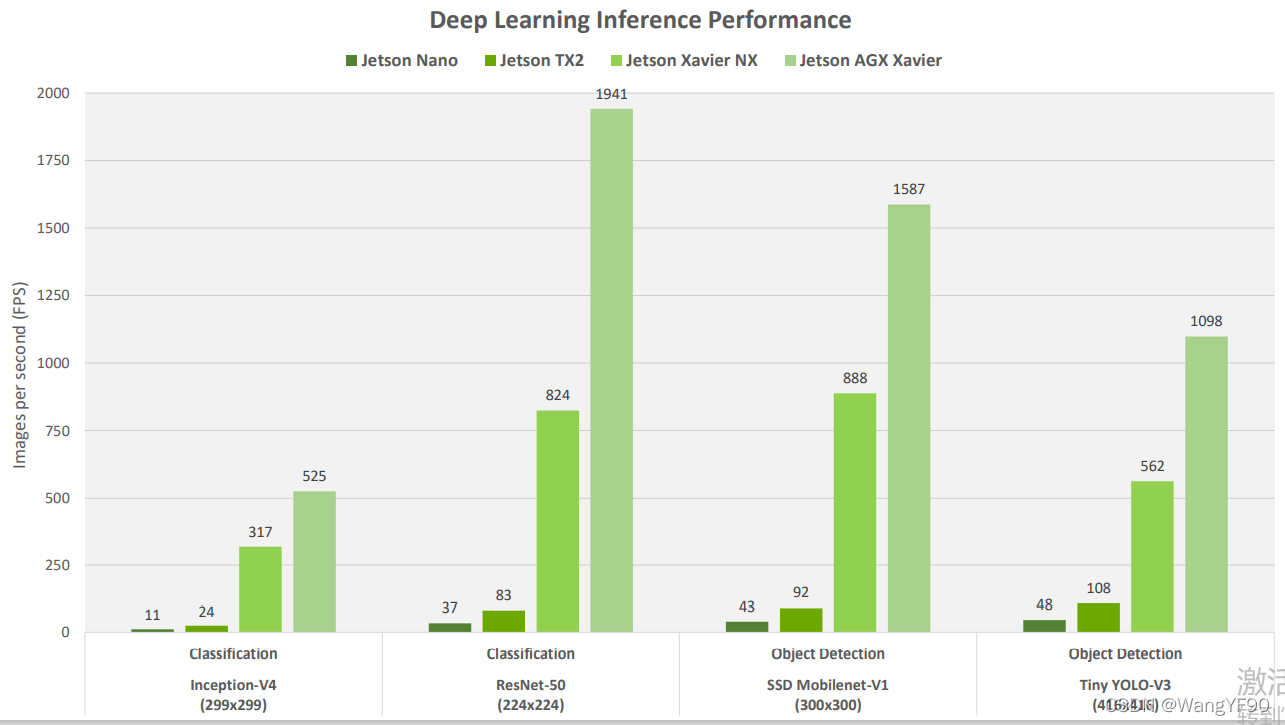
与其他jetson系列板卡的对比
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















