















































软件

产品


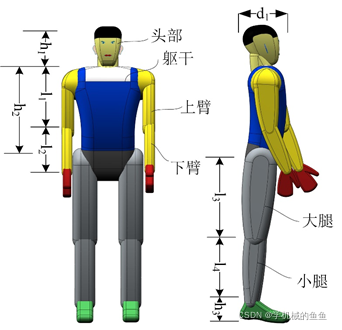
表1 人体身高1700mm时,各部位外形尺寸与质量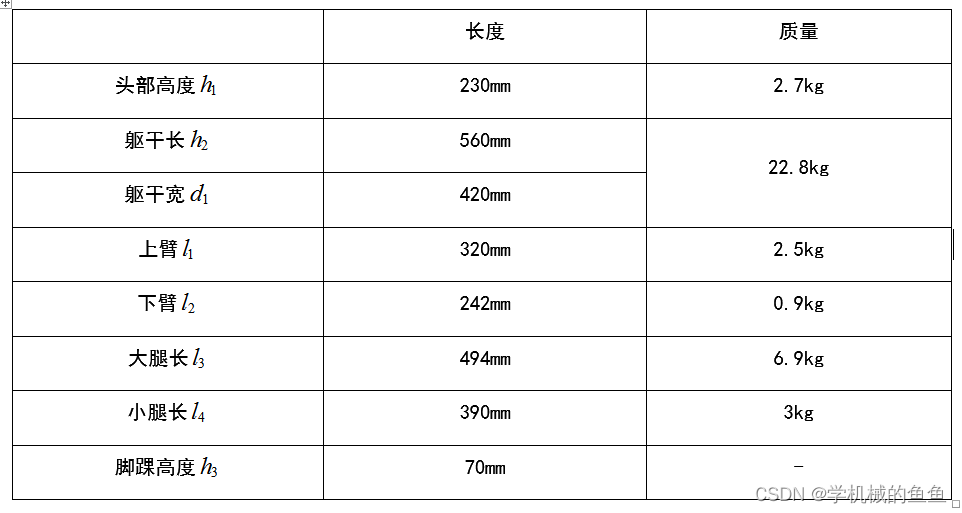
仿真时,脚底与地面的动摩擦系数设置为 0.3,静摩擦系数设定为1.0。
模拟 人体行走过程,设定两个行走周期,行走过程中各关节角度变化如图1-10所示
图1 左脚踝关节角度变化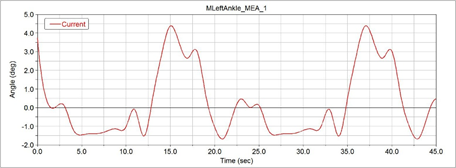
图2 右脚踝关节角度变化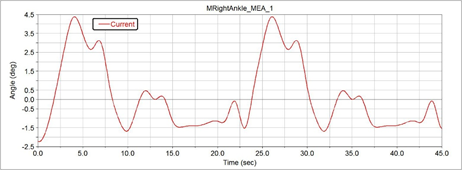
图3 左腿膝关节角度变化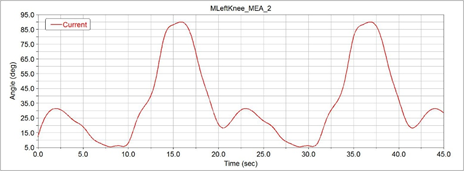
图4 右腿膝关节角度变化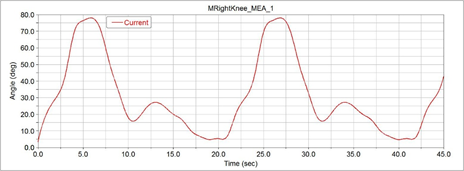
图5 左髋关节角度变化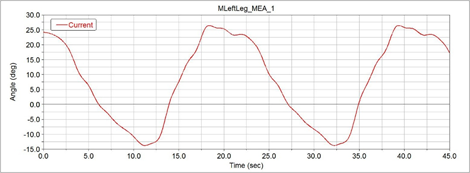
图6 右髋关节角度变化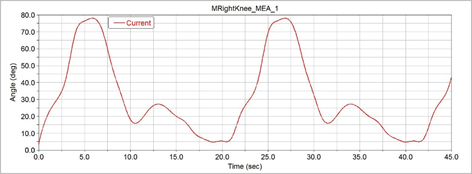
图7 右肩关节角度变化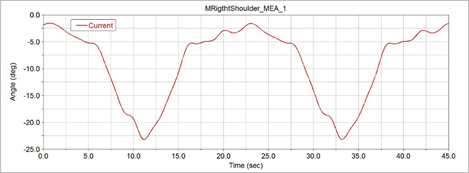
图8 左肩关节角度变化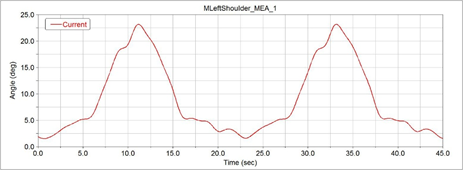
图9 右肘关节角度变化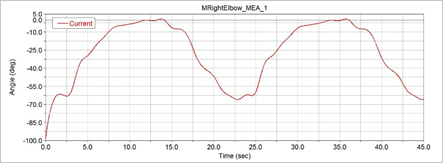
图10 左肘关节角度变化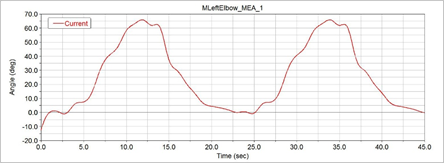
图11 人体质心与脚掌支撑位置示意图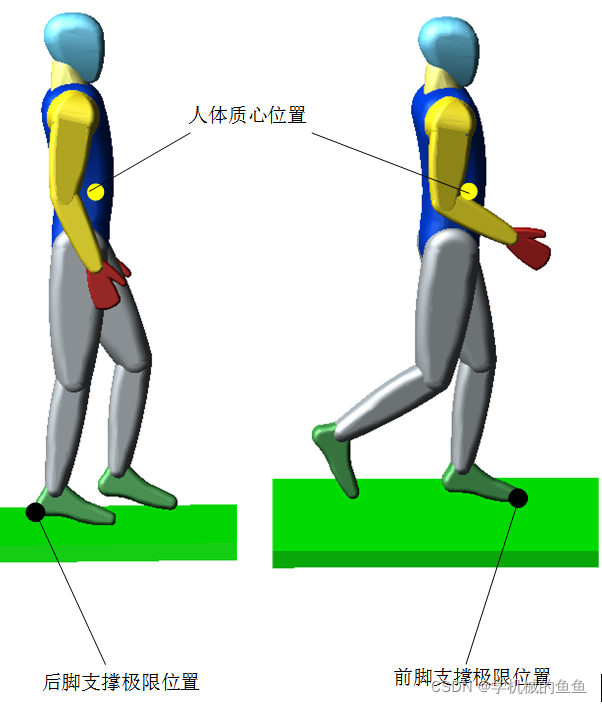
在人体受到向前的推力时,在人体向前行走的方向,若人体上半身质心超过了前脚支撑 极限 位置,则人会跌倒;若未超过,那么人就能够通过自身的调节,正常行走。若人受到向后的推力,则要判断上半身质心与后脚支撑极限位置。本文仅考虑人受向前的推力。
外部激励施加在人体上半身的质心位置,在ADAMS中设置作用时间为0.1秒,观察在不同大小的外部激励作用对人体行走的影响。
图12 外部激励施加示意图与在ADAMS 软件 中施加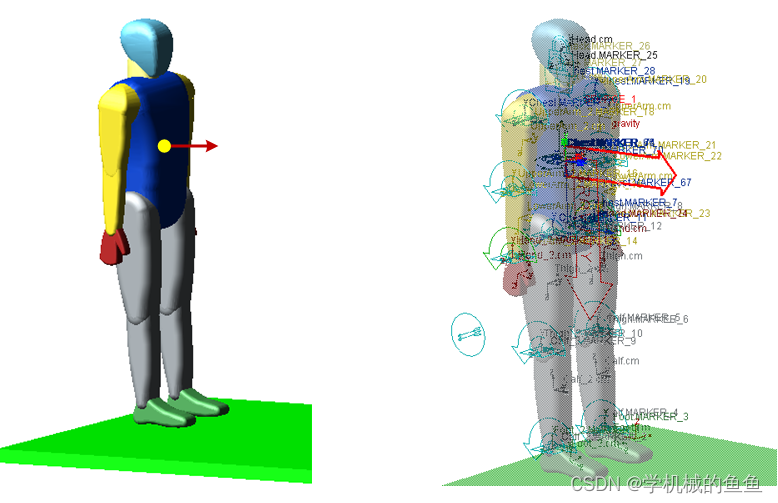
外部激励施加时间点在43秒,大小为100N时,人体上半身质心与脚部支撑点的变化如图所示。(注:红色实线代表人体质心变化过程,蓝色虚线代表脚部支撑点的变化过程。在0-40秒期间,人体在正常行走,所以两者是交替的。在43秒时受到外部激励,两者发生相应变化。)
图13 100N作用下人体上半身质心与脚部支撑点的变化过程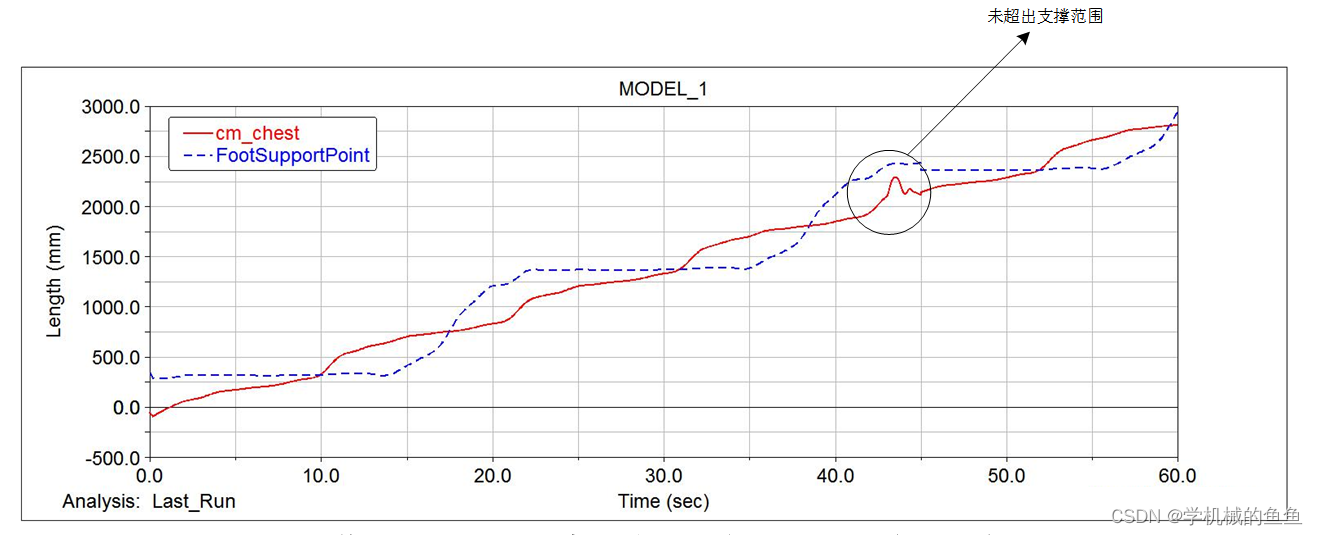
从图13中可以看出,在外部激励的作用下,上半身质心位置并未超过脚部支撑点位置,所以在100N的外部激励的作用下,人体不会跌倒。与仿真 动画演示 的效果一致。
当外部激励增大为300N时,人体上半身质心与脚部支撑点的变化如图14所示。
图14 300N作用下人体上半身质心与脚部支撑点的变化过程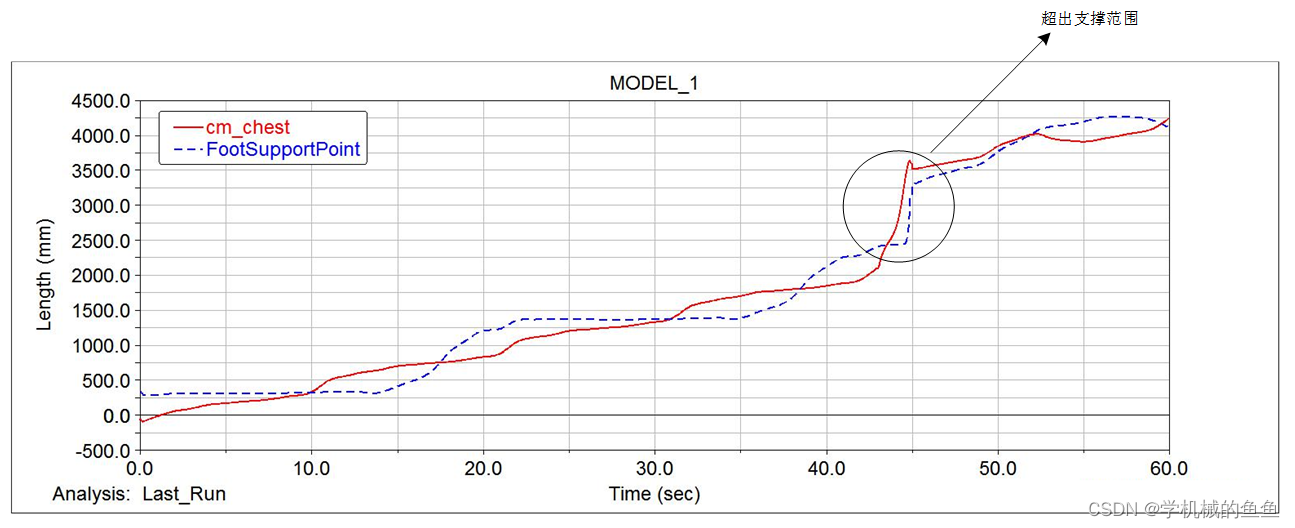
从图14中可以看出,在外部激励的作用下,上半身质心位置已经超过脚部支撑点位置,所以在300N的外部激励的作用下,人体不会跌倒。与仿真动画演示的效果一致。
200N 未跌倒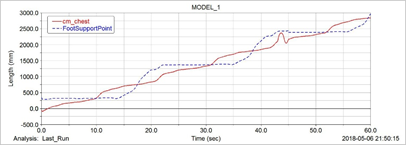
250N 未跌倒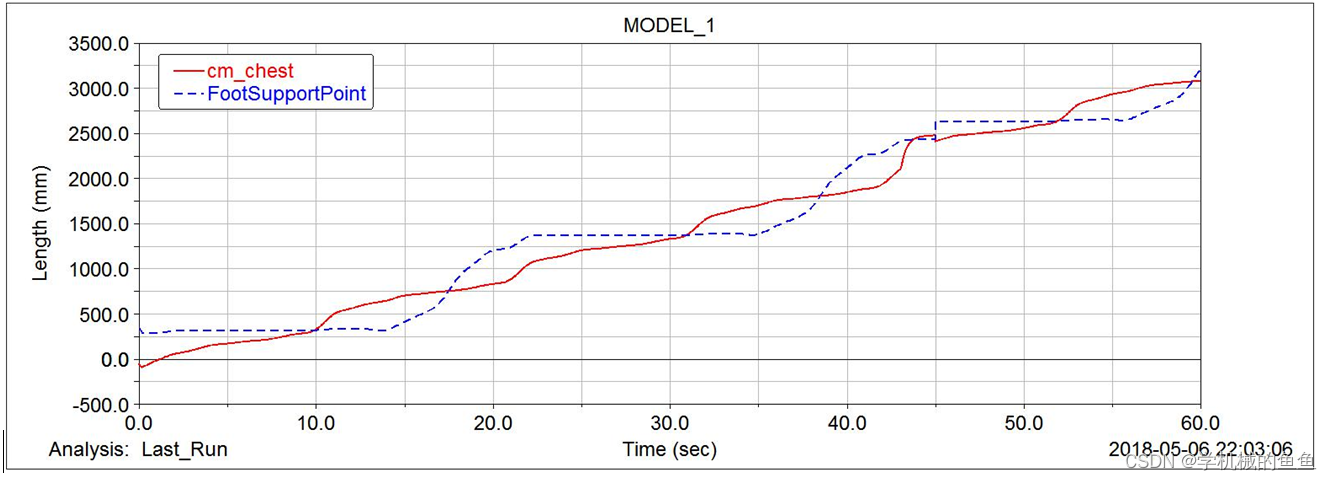
260N 跌倒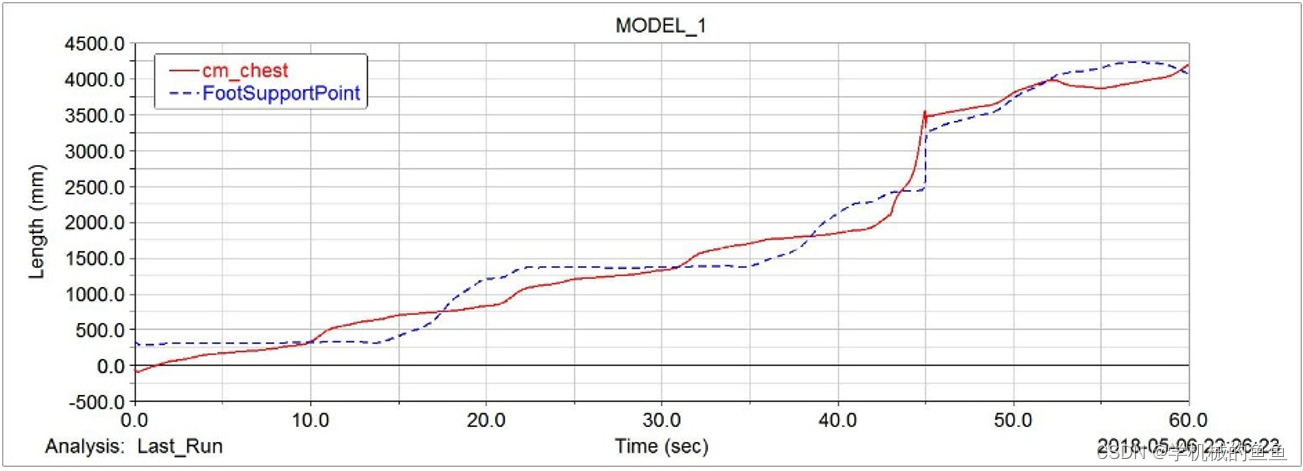
270N 跌倒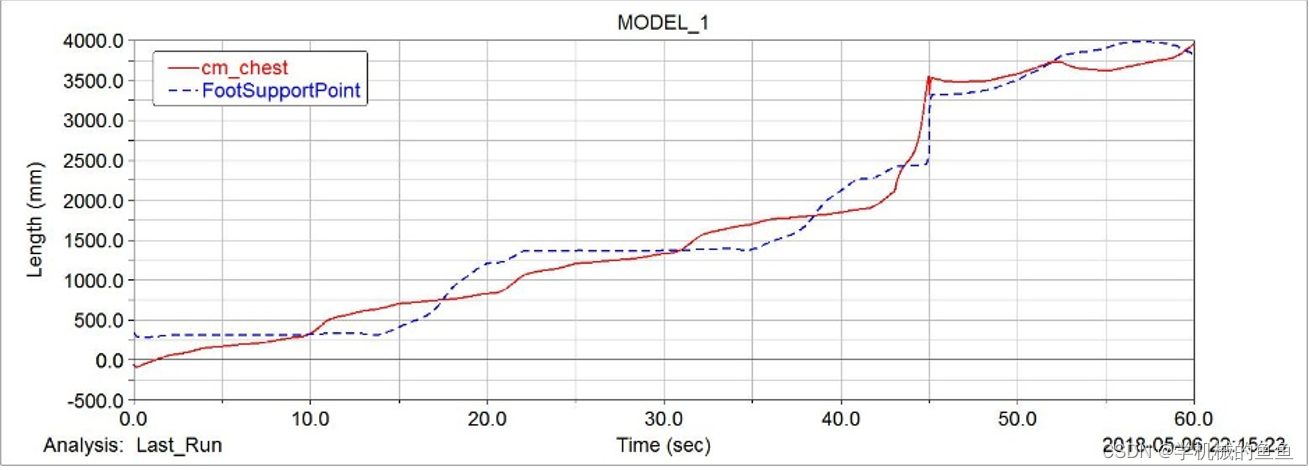
290N 跌倒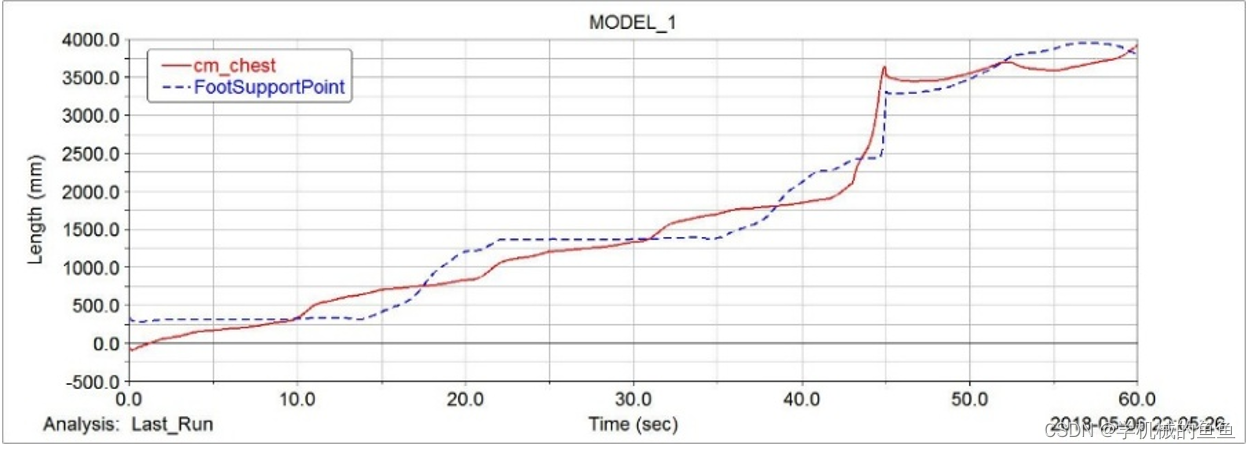
步距650mm时的跌倒判断标准与4.1节相同,具体实验 数据 见附件。
步距760mm时的跌倒判断标准与4.1节相同,具体实验数据见附件。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















