















































软件

产品


陈群响1,倪 斌1,郭群峰1,韩 创,陈 博2,陈 飞!,武乐成
(1海军军医大学附属长征医院骨科200003上海市;2上海交通大学附属瑞金医院伤骨科研究所200025上海市)
【摘要】目的:建立带肌肉组织的全颈椎三维有限元模型并验证该模型的有效性,为进一步分析颈椎疾患的生物力学作用机制建立良好的工作平台。方法:选取一名34岁健康男性志愿者进行颈椎薄层CT扫描,将CT原始数据以Dicom格式存贮。用Mimics17软件将CT图像逆向重建出颈椎三维点云模型,利用GeomagicStudio 2012软件把点云模型拟合成NURBS曲面模型,然后导入Hypermeshl2软件中进行网格划分、赋予材料属性、定义接触及边界条件等操作,最后提交至ABAQUS6.12软件进行有限元分析,将各个工况(前屈、后伸、侧弯和轴向旋转)下各节段活动度与文献数据进行比较,验证该模型有效性。结果:建立的带有肌肉组织的全颈椎三维有限元模型共包含789024单元,285045节点,外观与人体颈椎具有非常好的几何相似性。该模型在屈伸、侧弯及旋转工况下的活动度与文献数据进行了80次对比,共计24次(占30%)超出部分参考范围,其中,仅C5-6左右侧弯活动度8.4°、C0-C1左右旋转活动度24.2°超出所有参考范围(P<0.05)。结论:本研究建立的带有肌肉组织的全颈椎三维有限元模型符合有限元分析几何相似性和力学相似性要求,可用于颈椎生物力学分析。
【关键词】颈椎;肌肉;有限元;生物力学
doi: 10.3969/j.issn.1004-406X.2019.04.09 文章编号:1004-406X(2019)-04-0348-08文献标识码A 中图分类号:R318.01,TP391.41
枕颈椎退变性疾病、先天性畸形、外伤均可造成脊髓神经损害,影响患者生活质量,严重者甚至威胁生命。受不良姿势习惯、社会老龄化、交通运输发展以及诊疗水平提高等因素影响,以上疾病发生率日益增加,大部分患者需要手术干预。枕颈椎疾病的发生机制、手术方案可行性评估以及预防措施成为目前脊柱外科医生研究的主要方向。近年来,生物力学分析广泛应用于这些研究,其中三维有限元分析因其可重复性高、可比性强,可方便获取内部结构应力数据等优势而备受青睐(12)。建立模型是有限元分析的第一步,之前人们根据需要建立寰枢椎复合体、单节段或多节段下颈椎、包含颅底的全颈椎模型以及退变颈椎、颈椎前后路手术模型B-91,但这些研究的重点是对骨性结构建模。目前对于钩椎关节、关节突关节、椎间盘、主要韧带等结构的模拟已经比较逼真,对颈椎肌肉的模拟却未有报道。颈椎肌肉在颈椎运动及应力传导中的作用不容忽视I,此外,由于肌肉组织缺失、简化运算及操作等可能的原因,从模型中获得的应力并不等同于实际应力。随着建模技术及影像学技术的不断提高,人们对有限元分析的准确性提出了更高的要求,希望从形态学及运动力学两个方面均能全面、逼真地展示人体颈椎特点。为此,本研究在前期建立全颈椎三维有限元模型经验基础上3,尝试添加主要的颈椎肌肉,建立带有肌肉组织的全颈椎模型,并进行有效性验证,为软组织建模积累一些经验,进一步可将带肌肉组织颈椎模型应用于颈椎退变及外伤机制、上下颈椎相互作用关系等诸多方面的研究,为疾病预防及手术方案的制定提供科学指导。
采用256排螺旋CT扫描机(西门子公司Light Speed)在平卧位下进行扫描,扫描范围为枕骨至第二胸椎(C0-T2),得到0.75mm层厚的CT断层扫描影像522张,点阵物理距离为0.799mm,导出 DICOM 通用格式进行保存。提取CT扫描原始数据,以DICOM通用格式进行保存。用Mimics 17软件将前期临床采集的CT图像逆向重建出颈椎三维点云模型,用Geomagic Studio2012软件把Mimics17建立的点云模型拟合成可编辑的NURBS曲面模型,得到全颈椎三维实体模型(CO-T1)。
1.3全颈椎三维有限元模型(C0-T1)的建立及分析
1.3.1网格划分、赋予材料属性、定义接触利用Hypermesh 12对实体模型进行分析前处理。采用C3D6(一阶三棱柱)模拟皮质骨,采用C3D4(一阶四面体)模拟填充在皮质骨内的松质骨(表1)。

椎间盘采用辅以沙漏控制的C3D8R(一阶六面体)模拟,且采用不可压缩的超弹材料属性("(表2)。

采用多个只有轴向平移自由度、双节点SPINGA单元建立13种关键韧带,横韧带采用壳单元模拟,且采用正交各向异性材料属性2(表1),其余相关韧带采用弹塑性材料属性(,对于线性段采用抛物线进行拟合,直线段采用线性拟合叫(表3)。网格质量评估指标Jacobian比控制在0.6以上。

采用非线性面面通用接触关系模拟关节间的相互作用。将CO-C1之间设置为罚函数接触,将C2-T1小关节以及棘突之间的接触、C3-T7钩椎关节之间的接触、齿状突与寰横韧带、与枢椎之间的接触均设置为默认硬接触。按照各个肌肉解剖起止点,增加肌肉单元,采用spring单元模拟肌肉。参考文献(5)肌肉力位移曲线参数公式定义各条肌肉,公式如下:
MuscleForce=PCSA(44.48SLoxAL/0.7Lo+1–88.8)。
其中,PCSA为肌肉横截面积(physiologiccross-sectional area),SLo是静息肌小节长度,Lo是静息起点至插人点的距离(初始长度),△L是肌肉起点至止点的变化量。本研究中,参数PCSA、SLo由文献(15.I6获得,Lo为本模型中测量的结果(表4)。

1.3.2边界限定、施加载荷利用ABAQUS 6.12软件进行有限元分析。约束T1下终板全部6个自由度作为边界条件。在CO旋转轴上选择一参考点,将其与CO上终板节点建立DistributionCoupling约束,根据右手准则在中性点上施加X、Y、Z全局坐标的1.5Nm纯扭矩载荷(X-Y平面为水平面、X-Z为冠状面、Y-Z为矢状面),分别用以模拟颈椎有限元模型受到前屈、后伸、侧弯和轴向扭转四种载荷作用(图2)。
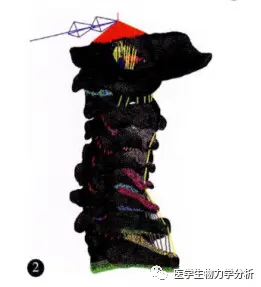
图2边界及载荷示意图
1.3.3全颈椎三维有限元模型(CO-T1)的有效性验证将以上分析所得的颈椎各节段活动度与文献数据进行比较,验证本文模型的有效性。基于作者在生物力学领域的研究经验(7~20)以及他们是针对完整的颈椎尸体标本进行生物力学测试,我们选择Ito S21、Panjabi2.23]以及陈强等(4的文献数据作为参考。
2结果
本研究建立的带肌肉组织的全颈椎三维有限元模型共包含789024单元,285045节点,外观逼真,具有非常好的几何相似性(图1)。

图1全颈椎有限元模型外观(a、b未添加肌肉;c、d添加肌肉)a矢状而观b轴侧观c正面观d侧面观
在前屈活动度比较中,可以看出,C1-C2的活动度为15.3°,大于Panjabi-2001[21最大值14.3°,其余节段活动度均落在Panjabi-2001[]范围之内(表5,图3a)。
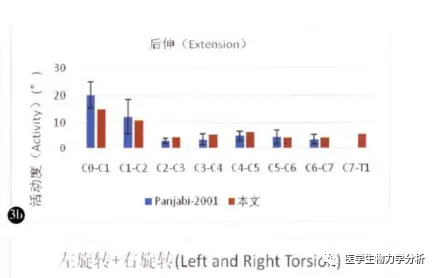
在后他活动度比较中,可以看出,CO-C1、C2-C3的活动度分别为15.0°、4.4°,落在Panjabi-2001(2]范围之外,其余节段活动度均落在
Panjabi-2001[m]范围之内(表5,图3b)。

在前屈+后伸活动度比较中,可以看出,C1一C2、C6-C7的活动度分别为26.3°、7.6°,落在部分参考文献范围之外,其余节段活动度均落在参考文献范围之内(表5)。
在左侧弯+右侧弯活动度比较中,可以看出,C0-C1、C3-C4、C6-C7的活动度分别为6.2°、13.0°、6.8°,落在部分参考文献范围之外,C5-C6活动度为8.4°,大于所有参考文献最大值,其余节段活动度均落在参考文献范围之内(表5,图3c)。
在左旋转+右旋转活动度比较中,可以看出,CO-C1活动度为24.2°,大于所有参考文献最大值,C1-C2、C2-C3、C3-C4、C5-C6、C6-C7的活动度大于Panjabi-2001(2])最大值,其余节段活动度均落在参考文献范围之内(表5,图3d)。
该模型在屈伸、侧弯及旋转工况下的活动度与文献数据进行了80次对比,共计24次(占30%)超出部分参考范围,其中,仅C5-C6左右侧弯活动度8.4°、C0-C1左右旋转活动度24.2°超出所有参考范围。通过不同文献之间互相对比,可以发现参考文献结果之间也存在差异。比如,前屈+后伸时,Ito[21]、陈强[24]的C1-C2活动度低于Panjabi-1998[123]的最小值(表5)。
综合以上对比结果可以看出,绝大部分节段活动度均落在参考文献范围内,小部分数据落在参考文献范围之外者偏差也不大,除个别情况,本模型相应数据至少落在其中一个参考文献范围之内。因此,本模型活动度结果可以接受,通过了模型有效性验证。

3讨论
目前颈椎病、颈椎外伤以及先天性枕颈部畸形发病率越来越高,这些疾病大多数需要手术干预,其发病机制、手术方案评估均需要借助生物力学研究(23.20],离体标本生物力学测试为此提供了宝贵的数据,但离体标本取材困难,可重复率不高而且无法测量椎体、椎间盘、小关节、韧带等结构内部应力及应变情况,此时三维有限元模型发挥了重要作用21]。三维有限元分析就是将宏观结构“网格化”为一定数量的单元,根据研究需要设置工况条件模拟实际环境,进而测量各单元应力、位移等数据(27]。它最早应用于材料工程学,近些年比较广泛地应用于脊柱外科研究。颈椎有限元模型的发展经历了从单一均质、线性模拟到微结构、非线性模拟,从模拟单向运动到能够模拟多向自由运动,从短节段建模到中长节段建模的过程3-刀,模型形态学质量及运动学能力不断提升。由于颈部肌肉数量多且走形复杂,之前建立的全颈椎模型均未添加肌肉(2.29),但肌肉作为枕颈椎活动的始动因素以及应力传导结构,对于枕颈椎模型仿真性、分析数据的准确性十分重要。故本研究目的是添加主要颈椎肌肉,建立带有肌肉组织的全颈椎三维有限元模型并验证其有效性。
颈椎椎体由多个自由曲面组成,是有限元建模最复杂的步骤。四面体单元和六面体单元是常用的网格类型[30.31,但各有优缺点,充分考虑研究需要、运算时间及成本、解剖结构性质特点等因素选择合适的网格类型是主要原则2-。对于颈椎的骨性结构,采用C3D4(一阶四面体)和C3D6(一阶三棱柱)网格对其进行网格划分。因为一阶单元分析负荷小,计算机占用资源少,同时四面体单元对不规则结构的拟合性较好,适当的对其进行加密,可以达到较为精确的结果。椎间盘外形较为规则,在颈椎运动过程中变形较大,六面体网格可以较为精确的描述应力梯度区域,而且在同样尺寸的前提下,六面体网格单元比四面体网格单元数量大幅减少,会节约大量的计算时耗,因此六面体单元最常用于椎间盘建模(13.37。本实验椎间盘采用带有沙漏控制的C3D8R(一阶六面体网格)建模,这是因为沙漏控制可减少单元大变形而产生体积自锁,改善模型收敛性。韧带建模需描述各条韧带的起始点、长度及横截面积38。虽然采用C3D8或C3D4网格建立的韧带模型外观较为逼真,但计算收敛性很差,并且消耗大量的计算时间,因此韧带采用多个双节点SPINGA单元进行划分,SPINGA单元只有轴向平移自由度,但已经足够满足研究需要(35)。
韧带是对抗应力的单轴结构,存在一定的伸缩性,因此基于弹塑性材料属性进行定义,根据经典的弹塑性载荷-变性曲线拟合各韧带,其中线性段采用抛物线进行拟合,直线段采用线性拟合。由于横韧带的三轴长度以及纤维蛋白的组成方式差异较大3),故其采用壳单元模拟,定义为正交各向异性材料属性。
离体标本实验时肌肉只有被动拉伸或收缩,没有主动收缩,因此本模型肌肉采用spring 单元模拟。我们主要从长度、附着起始点、横截面积、伸缩性等方面模拟颈椎肌肉,其中伸缩性采用VanEe等s的力-位移曲线公式来描述。由于从脱水后的尸体标本上测得的肌肉体积数据不准确,Van Ee等5分别从MRI上测量肌肉体积,从尸体标本上测量肌纤维长度,然后再计算肌肉的横截面积,这种方法计算出的横截面积更接近真实值,因此本文采纳这组数据,并直接从模型上测量各肌肉起始点长度,尽可能提高模拟准确性。
本研究采用非线性面面通用接触关系模拟关节间相互作用。由于CO-C1和C1-C2之间没有椎间盘连接,小关节面比较平坦,在设置接触时尚未建立颈椎肌肉组织,CO活动时力、力矩的传导仅靠周围韧带以及小关节之间的接触,因此CO-C1之间设置为罚函数接触,C2-T1小关节以及棘突间、C3-T7钩椎关节间的接触、齿状突与寰横韧带、与枢椎的接触均设置为默认硬接触。通过设置合适的接触距离和压强(均是人为经验值),保证模型在计算的时候平稳接触,并在一定的容差内维持接触状态,提高收敛性能,牺牲一点计算精确度。
三维有限元模型主要从几何学及形态学相似性两方面评估其质量。本模型从外观上看十分逼真,通过与Ito21)、Panjabi(n.231以及陈强(2等的参考文献比较,它能够有效模拟颈椎各个方向活动,且各节段活动范围与参考文献基本一致,小部分数据落在参考文献范围之外者偏差也不大,除个别情况,本模型相应数据至少落在其中一个参考文献范围之内。由于存在研究对象年龄、颈椎退变程度、人种身体构造、标本干湿状况、材料属性参数来源等诸多不同,以及建模过程中的简化操作会对模型精度造成影响,模型与模型之间存在一些差异十分正常。比如在前后屈伸时,Ito(2、陈强24提供的C1-C2活动度低于Panjabi-199812的最小值。综上,本模型通过有效性验证。
随着时间的推移,颈椎内固定术后邻近节段退变加速的问题越来越凸显,人们开始意识到应该将颈椎作为一个整体来研究。比如临床研究(发现,寰枢前凸角与下颈椎前凸角存在负相关关系,如果术中将寰枢椎固定于过大前凸角度,术后容易会出现下颈椎曲度变直甚至反弓(4)]。T1受胸廓固定,上终板与水平线夹角即T1倾斜角(T1S)在一定时期内保持相对恒定,人们观察到T1S与下颈椎前凸角存在正相关关系(2)。上颈椎内固定术后颈椎曲度及重心改变可能是寰枕、寰枢融合角及T1S角共同作用的结果,术后颈椎肌肉超负荷疲劳可能是顽固性颈项痛的原因之一,其发生机制及规律尚需生物力学进一步验证。显然,短节段或者缺乏肌肉韧带的模型已经无法满足研究需要。本研究所建立模型向上包含寰枕关节,向下包含第一胸椎,而且添加了主要肌肉,是目前结构最完整的颈椎模型,也是颈椎肌肉建模的一次重要尝试。它不仅可以用于上下颈椎生物力学相互关系及作用机制研究,还可用于设计、评估手术方案以及预测术后颈椎改变趋势。随着软组织成像以及建模技术的提高,未来有望建立包含所有肌肉韧带的全颈椎模型,实现形态相似及应力分布相似,基于这种模型基础上的有限元分析精度更高,结果也更可靠。
受现有技术水平限制,该模型也存在一些缺陷:第一,结构描述越详尽,运算时间越高,为了突出效率,本研究将各结构内部材料属性均质化、结构之间接触简化处理,这些均有可能对以该模型为基础的实验结果造成一定影响;第二,附着在颈椎上的肌肉多,宏观及微观纤维走形复杂,肌肉各部分性质不尽相同,目前尚缺乏公认可靠的肌肉有限元数据,本模型仅添加20余条主要肌肉,还有许多肌肉未添加进来,同时现有条件还无法模拟出肌肉的动力特点。因此,与人体颈椎解剖结构及运动特点更加吻合、颈部软组织功能更加完善的全颈椎三维有限元模型需要进一步研究开发。
免责声明:文章仅供交流学习,版权归原作者所有。如涉及版权,请联系删除
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















