















































软件

产品


摘要
目的 运用三维有限元分析方法验证植骨融合后 OLIF 辅助单侧椎弓根钉棒固定能 否为相应融合固定节段提供足够的椎间稳定性。
方法 在人正常 L3~S1 节段 CT 扫描数据的基础上,利用 Mimics、Geomagic、3-matic 软件建立人正常 L3~S1 三维有限元模型(M0),以此为基础联合使用 Freeform 等软件 分别建立 L4-5 节段 OLIF Stand alone 模型(M1)、OLIF 辅助单侧椎弓根钉棒固定(Wiltse 入路)模型(M2)、OLIF 辅助双侧椎弓根钉棒固定(Wiltse 入路)模型(M3)、PLIF 辅助双侧椎弓根钉棒固定模型(M4),MTLIF 辅助单侧椎弓根钉棒固定模型(M5)。使用 MSC.Patran/Nastran 有限元软件设定责任节段椎间为骨性融合后,在 L3 上表面施加 500N 预载荷,再施加 10N·m 的力矩模拟脊椎前屈、后伸、侧屈及旋转等生理活动,观 察不同工况下 L4-L5 节段相对活动度(ROM)、椎间融合器和椎弓根钉棒应力分布状况。
结果 1、6 组有限元模型各运动状态下 ROM 值由小到大排序为:M3,M4,M2, M5,M1,M0;其中,M1ROM 与 M0 最接近,M2ROM 相较 M0 显著减少,M3ROM 在所有模型中最小;M2 相比 M0、M1 在前屈和后伸时稳定性较好,相比 M5 在后伸和 左旋转时稳定性较好,M3 相比 M2 在前屈和后伸时稳定性较好,M4 相较 M2 在后伸和 右侧弯时稳定性较好;M2 与 M0 在右侧弯和右旋转时稳定性接近,M2 与 M1、M3 在左 右旋转时稳定性接近,M2 与 M4 在前屈和左侧弯时稳定性接近,M2 与 M5 在左右侧弯 时稳定性接近;M2 各运动状态 ROM 虽大于 M3、M4 两组模型,但 M2 较 M0ROM 变 化幅度远大于 M2 与 M3、M2 与 M4 之间 ROM 的变化幅度。2、融合器应力峰值方面, 除直立时 M2 应力峰值略高于 M1,其余运动状态下 OLIF 各手术组融合器应力峰值随着 附加椎弓根钉棒数量的增加而表现出一定的减少趋势,这种趋势以后伸时表现最明显;后伸时 M1 融合器应力峰值大于 M4,附加单侧椎弓根钉棒固定后的 M2 与 M4 相比融合 器应力峰值差异明显减小,附加双侧椎弓根钉棒固定后,M3 融合器应力峰值低于 M4除后伸状态外,M2 融合器应力峰值明显小于 M4,M5;所有运动状态下 M3 融合器应 力峰值均较 M2 减小,除后伸状态时二者应力峰值差异明显,其余状态 M2 与 M4、M2 与 M5 之间的应力差异均明显大于 M2 和 M3 之间。3、钉棒应力峰值方面,M2 除直立 时钉棒应力峰值略高于 M5,后伸时高于 M4,其余运动状态 M2 应力峰值均较 M4,M5 明显下降;M2 钉棒应力峰值除右侧弯时明显低于 M3,左侧弯时略低于 M3,其余运动 状态下其钉棒应力峰值均高于 M3,但这种应力差异除右侧弯和后伸时较明显外,其余 状态 M2 与 M4、M2 与 M5 之间的应力差异均明显大于 M2 和 M3 之间。4、五组手术模 型钉棒及椎间融合器应力峰值均远未达到其屈服强度。
结论 1、本研究建立了正常脊柱(L3-S1)有限元模型,结合前人研究结果对模型 进行了有效性验证,证明模型具备有效性,可用于下一步的实验研究。
2、OLIF 辅助单 侧椎弓根钉棒固定模型手术节段稳定性优于 OLIF Stand alone、MTLIF 辅助单侧椎弓根 钉棒固定模型,略差于 OLIF 辅助双侧椎弓根钉棒固定模型及 PLIF 辅助双侧椎弓根钉棒 模型。3、OLIF 辅助单侧椎弓根钉棒模型可以为相应融合固定节段提供足够的椎间稳定 性。
关键词 有限元分析,腰椎融合术,斜外侧椎间融合术,单侧椎弓根钉棒固定。
前言
对于脊柱骨科常见的腰椎退行性疾病,有一个规范化的阶梯治疗原则,按强度等级 由弱到强排序,可以分为保守治疗,微创治疗,减压手术,非融合术,融合手术,其中 融合手术是腰椎疾患的最终解决方案。回顾脊柱融合手术的发展,前路腰椎椎间融合术 (Anterior lumbar interbody fusion,ALIF)、后路腰椎椎间融合术(Posterior lumbar interbody fusion,PLIF)、经椎间孔入路腰椎椎间融合术(Transforaminal lumbar interbody fusion,TLIF)等传统手术具有技术成熟、成功率高等优点,但其并发症相对较多,极外 侧入路腰椎椎间融合术(Extreme lateral interbody fusion,XLIF)以其微创操作,出血少、 术程短,疼痛轻、恢复快等优点曾经风靡一时,但它正中地从腰大肌进去以后对输尿管、 交感神经链的损伤时有发生为其不足之处,其术后股痛感觉异常甚至达到了 30%。而斜 外侧椎间融合术(Oblique lateral interbody fusion,OLIF)使用一个自然通道作为手术入路 (即在腰大肌与腹主动脉之间放置通道进行手术操作),因其创伤小、出血少、神经并 发症低等优势,近年来被广泛应用于退变性腰椎疾患的前方间接减压及椎间融合[1~7]。
由于 OLIF 技术所采用的椎间融合器无论是自身体积还是植骨空间与面积,均远大 于后路传统的融合器、并且融合器植入时横跨双侧椎体骺环,其界面固定的稳定性也明 显增强[8],使得应用单纯前方融合固定(即 OLIF Stand alone)成为可能。然而,腰椎退 变性疾病多为老年患者,受患者年龄、骨质条件、椎间隙处理技术等诸多因素影响,融 合器的下沉、移位等并发症不容忽视[9],多数情况下需要辅助后路的固定[10]。采用双侧 椎弓根钉棒系统进行固定可以达到良好的固定稳定性、能够有效防止融合器下沉及松动 移位,已成为辅助固定的经典方式。对于 OLIF 而言,相对创伤小、花费低的单侧椎弓 根钉棒辅助固定能否达到有效的固定稳定性,是否影响融合器下沉及椎间融合,尚待进 一步研究。
有限元分析(Finite element analysis,FEA)这一概念早在上世纪四十年代就已提出, 最早应用于航空航天和工程设计领域。基本原理是将一个由无限个质点构成的连续体划 分成有限个小单元所组成的集合体。计算机辅助软件的兴起为有限元技术的普及、应用 提供了媒介。有限元技术的应用也从最初的工科相关领域逐渐延伸到医学领域,并进一 步拓展其在心内科、呼吸科、消化科、骨科等三级学科中应用的深度和广度。脊柱骨科 作为骨科的一个细分领域,自 Belytschko [11]在上世纪七十年代初引入该方法后,有限元 分析在处理脊柱生物力学问题时表现出强大的功能[12]。脊柱作为人体的中柱,其结构由 较复杂精细的线性和非线性材料参与构成,这增加了通过构造脊柱物理模型还原脊柱解 剖实况的难度。虽然可通过临床研究或体外实验方法渠道完成对脊柱力学性能的研究评 价,但该渠道获取生物力学资料的手段受客观条件的限制较多,相较体外实验而言,有 限元分析无需新标本即能对个体参变量提供修正。能分析计算某一具体参数,比如脊柱 单一或整体节段相对活动度、刚度、椎间盘及椎体范式等效应力等。还能评估不同手术 方式及治疗手段对脊椎力学性能产生的影响。
本研究拟使用有限元分析方法,建立 OLIF Stand alone、OLIF 辅助后路单侧椎弓根 钉棒固定、OLIF 辅助后路双侧椎弓根钉棒固定、PLIF 辅助后路双侧椎弓根钉棒固定、 MTLIF(Modified transforaminal lumbar interbody fusion,TLIF)辅助后路单侧椎弓根钉棒 固定五种手术模型,对比脊柱前屈、后伸、旋转和侧弯状态下 OLIF 辅助后路单侧椎弓 根钉棒固定与其它手术融合固定方式的手术节段椎间稳定性及植入器材应力差异,为 OLIF 技术应用于腰椎退变性疾病的治疗提供一定的力学参考。
材料与方法
1.1 研究对象
经×××大学总医院伦理审核批准,征集健康男性成年志愿者 1 例(37 岁,身高 176cm,体重 75kg),既往无腰椎创伤、疾病史,拍摄腰椎 X 线片排除腰椎病变。用 CT 对志愿者行层厚 0.625mm 连续扫描,将获取的原始数据以 DICOM 格式储存。1.2 研究设备 1.2.1 使用宝石能谱 CT(GE Discovery CT750 HD),由×××大学心脑血管病医院提供。1.2.2 家用台式电脑(至睿、Windows7 操作系统、电脑内存 4GB、Intel i5 四核处理器)。1.3 研究软件:Mimics20.0、3-Matic12.0 作图软件、Geomagic Studio12.0、Freeform2017 建模软件、Hypermesh13.0 网格化分软件、MSC.Patran/Nastran2012 有限元分析软件
2. 研究方法
2.1 腰骶椎有限元模型建立
2.1.1 原始数据的读取
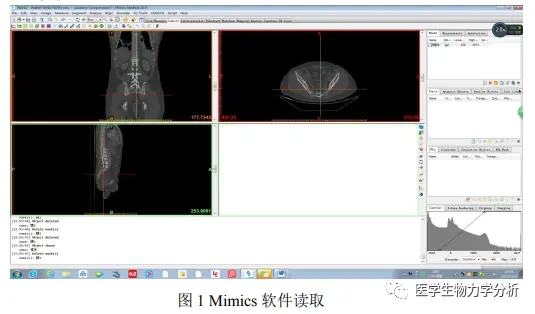
采用宝石能谱 CT 对志愿者全脊柱进行连续扫描(矩阵 512×512,层距层厚皆为 0.625mm)。存储在 DVD 中,在家用电脑中以 DICOM 格式读入医学有限元建模软件 Mimics20.0,见图 1
2.1.2 脊柱节段和阈值范围的截取
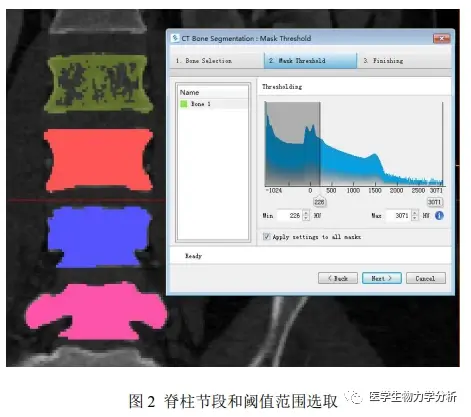
使用 CT Bone Segmentation 功能键截取 L3-S1 椎体,该功能键具有针对骨骼组织特 有的专一性,通过默认阈值范围的选择,即可筛掉除 L3-S1 椎体以外的其它结构,包括 血管、软组织和其他骨骼结构,且每块椎体都可作为独立单元接受处理。见图 2。
2.1.3 脊柱三维初步图像的建立
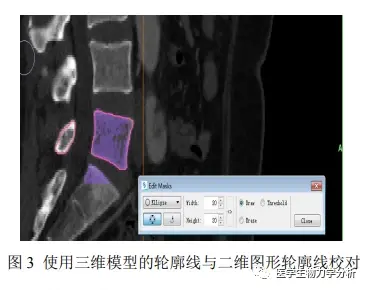
使用 Mmics 软件中 Edit Masks 的擦除、绘制功能,填充二维蒙版图像中的缺如部分, 消除其多出部分,使用 3D 计算功能键进行三维建模,在三维图像工具栏 Objects 标签中 Contour 栏点亮“眼镜”,此时二维图像中出现高亮显示的三维模型轮廓。通过 Edit Masks 相应功能键和 3D 计算建模反复校对高亮轮廓与 CT 原始图像轮廓,直至二者轮廓基本重 合。由于 CT 对软组织分辨缺乏敏感性,椎间盘不能通过骨骼分割功能进行提取,需使 用 Edit Maks 中的绘制功能额外补充,椎间盘重建的其余原理同椎体。最后在三维图像 的功能栏中利用 Wrap 和 Smooth 功能一键光滑处理三维模型,得到研究脊柱节段初步型。(见图 3、4)

2.1.4 三维模型的精细处理
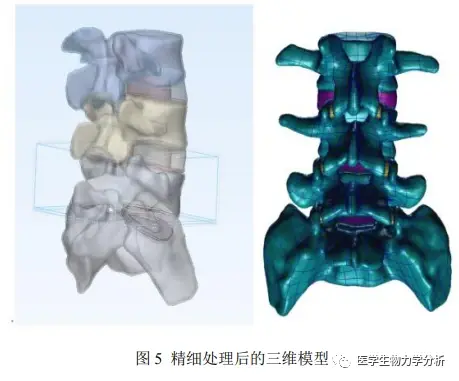
由于 Mimics 软件建立的三维模型相对粗糙,其本质是三角面片模型,结构扭曲与 畸形现象大量存在,缺乏关节突关节,且椎体与椎间盘内部结构分区不明确。故将其以 STL 格式保存后,导入 3-Matic 软件,使用 Local Smooth 和 Push And Pull 功能对椎间盘 的形状和光滑度进行调整。再将文件转入逆向工程软件 Geomagic 中,对椎体、椎间盘 进行降噪、填充孔洞、去除特征、三角面片细化、光顺化处理及曲面化等操作,同时添 加小关节间的关节软骨(用结构体替代),生成逆向脊柱几何实体模型。再导入 3-matic 软件,通过 Interactive Translate、Scale、Hollow 和 Trim 等功能结合布尔运算的加减法, 对椎间盘进行髓核、纤维环、上下软骨终板的区域划分,同理使用 Hollow 功能键和布尔 运算的加减法对椎体进行皮质骨、松质骨进行划分。处理完毕后,上下软骨终板与椎体 上下表面无缝对接,各终板厚度均为 1mm,髓核占整个椎间盘面积的 44%,位置处于椎 间盘的中心偏后 3.5mm,剩余结构为椎间盘的纤维环;皮质骨为厚度 1mm 的壳状物, 松质骨在皮质骨的包饶下紧密贴合。(见图 5)
2.2 内固定及椎间融合器的建立
本课题椎弓根钉棒系统为山东威高公司的 UPASS2,OLIF、PLIF 及 MTLIF 使用的 融合器为美敦力的 Clydesdale、Capstone(PLIF 和 MTLIF 均使用 Capstone),根据钉棒、 椎间融合器的形状参数在 Freeform 建模软件中建立单节段长钉固定钉棒系统、 Clydesdale、Capstone 椎间融合器的三维实体模型。其中螺钉直径为 6.5mm,长度为 40.0mm,螺钉形状参照实物(不保留螺纹),连接棒直径为 5.5mm,长度为 53.0mm, Clydesdale 椎间融合器为插入式融合器,长宽高为 50mm,18mm,12mm,为头尖尾宽 的弧形设计,前后墙不等高,上下面成 6 度夹角设计,Capstone 椎间融合器长宽高为 22mm,10mm,12mm,两种 cage 的上下面均设有一定弧度以便与上下终板紧密贴合, 上下表面均设计为倒齿状多面体结构。之后将手术植入器材文件导入 Geomagic 软件进 行逆向工程处理。(见图 6、7、8)



2.3 实验模型的建
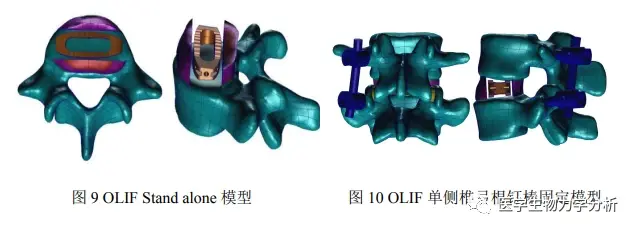
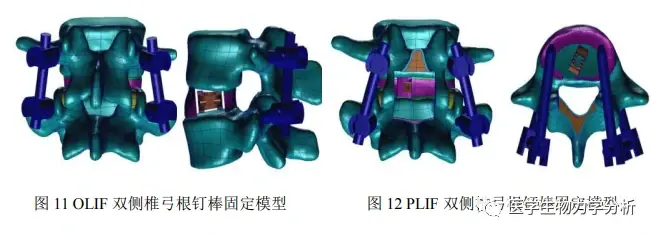
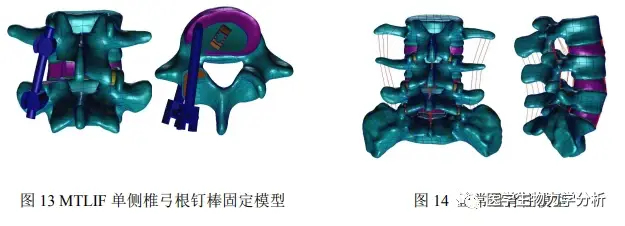
用 Freeform 软件将脊柱、内固定系统、椎间融合器装配在一起,建立 OLIF Stand alone 模型(M1)、OLIF+左侧椎弓根钉棒固定模型(M2)、OLIF+双侧椎弓根钉棒固定模 型(M3)、PLIF+双侧椎弓根钉棒固定模型(M4)、MTLIF+左侧椎弓根钉棒固定模 型(M5)、空白对照组(M0)。模型设计参照临床手术方法,以腰 4-5 节段为责任手 术节段,融合器均为单枚、左侧植入,单边固定均为左侧钉棒固定。M1:以椎间盘前后 缘为界将其由前向后等分为 4 区,去除 2 区和 3 区的纤维环、髓核及软骨终板,将 Clydesdale 椎间融合器由左向右植入腰 4-5 间隙完成界面固定。M2:融合器植入同 M1, 辅助 L4-5 节段后路单边椎弓根钉棒固定,模拟 Wiltse 入路进钉入点及方向。M3:融合 器植入同 M1,辅助 L4-5 节段后路双边椎弓根钉棒固定,余同 M2。M4:后路腰椎椎间 融合术(PLIF),切除 L4-5 全椎板,经椎间孔与后方纤维环移行区切开纤维环、去除髓核和上下软骨终板,将 Capstone 融合器斜行置入完成椎间融合,辅助 L4-5 节段双侧椎 弓根钉棒固定。M5:改良经椎间孔入路椎间融合(MTLIF),切除 L4-5 关节突关节及 L4-5 左侧半椎板,经椎间孔于纤维环的外侧区去除部分纤维环、髓核和上下软骨终板, 将 Capstone 融合器斜行置入,L4-5 节段单侧椎弓根钉棒固定。M0:为正常对照组,不 做任何处理。见图 9,10,11,12,13,14。
2.4 有限元网格划分
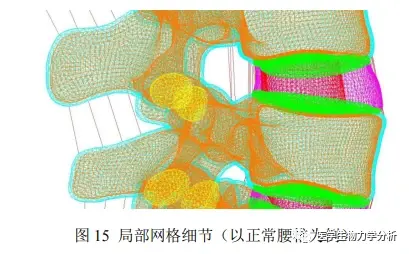
将六种模型 STEP 文件导入 Hypermesh 软件中进行网格划分:M1 共计 134876 个节 点,673565 个四面体单元;M2 共计 139263 个节点,694474 个四面体单元;M3 共计 145047 个节点,722619 个四面体单元;M4 共计 138566 个节点,689783 个四面体单元;M5 共计 168788 个节点,872138 个四面体单元;M0 共计 135602 个节点,685957 个四 面体单元;脊柱各椎体、椎间盘、椎间关节皆采用实体单元网格。见图 15
2.5 重建韧
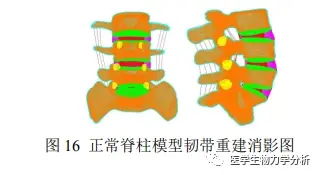
将文件以 BDF 格式导入 MSC.Patran/Nastran,对六组模型进行韧带重建,各韧带采 用 1D 两节点非线性弹簧单元。正常腰椎有限元模型中韧带包括前纵韧带、后纵韧带、 黄韧带、横突间韧带、关节囊韧带、棘间韧带和棘上韧带等。OLIF 三组手术模型均不切 除韧带,PLIF 有限元模型切除 L4-5 节段棘间韧带(包括 L3-4 棘间韧带)、棘上韧带、 黄韧带、后纵韧带,保留其余韧带。MTLIF 有限元模型切除 L4-5 节段左侧后纵韧带、 左侧黄韧带,其余韧带不破坏。见图 16。
2.6 设定接触
定义有限元模型中的接触面,定义椎骨与椎间盘、融合器之间的接触为绑定。关节 突与结构体、螺钉与螺钉孔之间设定为摩擦接触,摩擦系数为 0.2。椎骨与上方参考点之 间的接触定义为耦合。
2.7 材料属性假设与参数赋予
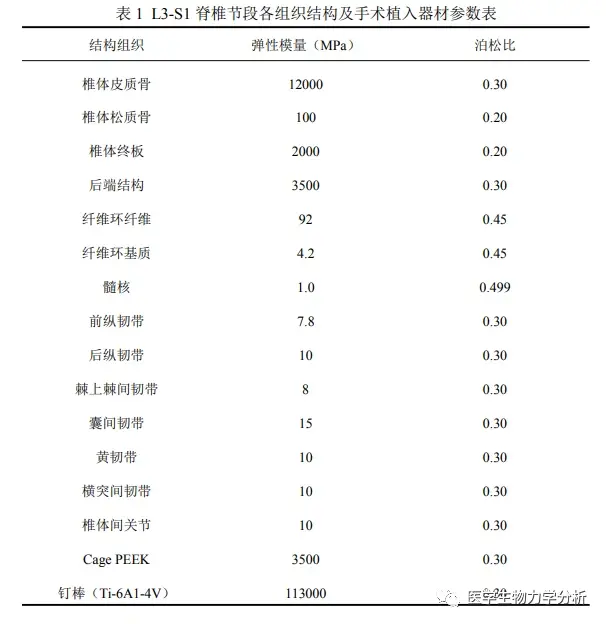
假设骨骼组织为匀实、各向同性、联贯的线弹性材料;假设椎间盘纤维环为各向同 性、均匀、连续的弹性体,其中髓核设为黏弹性材料,参考国内外前人研究数据[13~19], 本实验研究的 L3-S1 脊椎节段各组织结构及手术植入器材的材料属性见下表 1 所示。
2.8 边界条件的假定与载荷施加
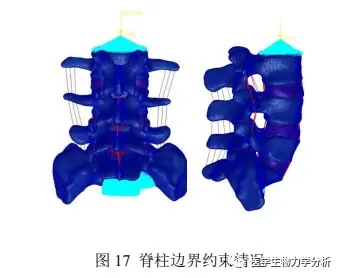
固定约束 S1 椎体下表面。在 L3 上表面添加垂直载荷 500N 以模拟人体自身重力对 脊柱的轴压载荷(直立状态),并将 L3 上表面点全体耦合在脊柱旋转中心上方某一参 考点上,径直施加运动附加力 10N·m 纯力矩,模拟人体前屈、后伸、左右侧屈、左右旋 转运动。L3-S1 脊柱边界约束情况,见图 17
2.9 有限元模型的生物力学分析
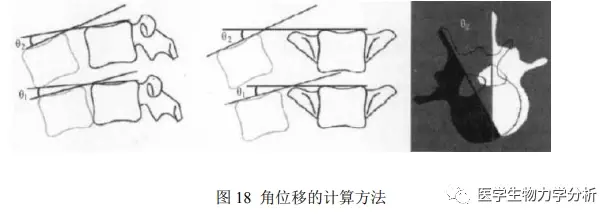
本研究针对 M1、M2、M3、M4、M5、M0 六组有限元模型进行载荷受力分析。主 要分析计算指标包括六个模型在不同计算工况下腰 4-5 节段的相对活动度 ROM、椎间融 合器及椎弓根钉棒系统的应力分布。本研究运用角位移表示脊柱节段活动度,计算方式:记录不同脊柱节段上下椎体上表面空间位置坐标,连接成线,计算运动前后见图 18 所 示连线所成夹角差的绝对值,即θ2-θ1,所得结果即为该节段角位移,左右旋转工况下因 只有θ2,此时θ2 即为角位移。
结果
1. 模型有效性验证
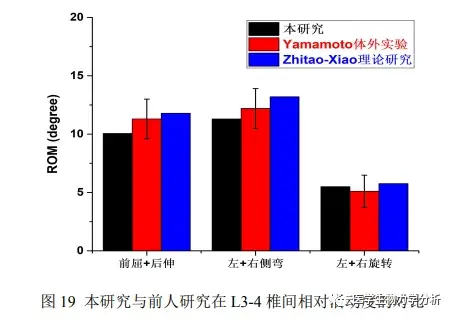
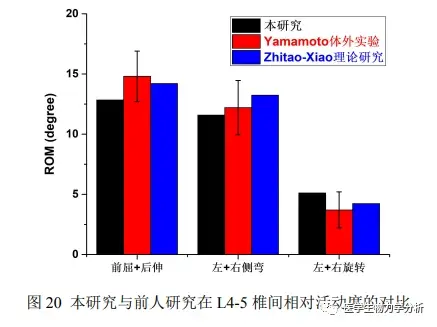
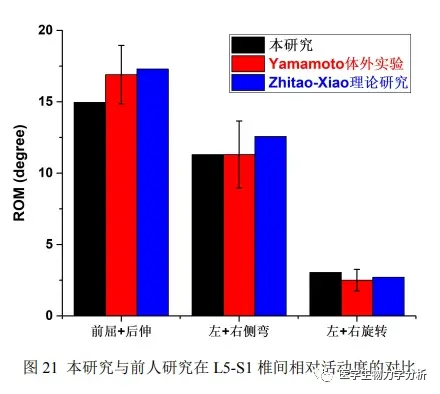
根据前述荷载及约束条件,在正常组脊柱模型基础上,计算脊柱各节段 ROM,所 得结果与 Yamamoto、Zhitao Xiao 等[17~19]的研究进行比较,对模型有效性进行验证。结 果表明本实验正常组脊柱有限元模型在不同运动状态下各脊柱节段 ROM 和所比较前人 研究结果相近(见图 19,20,21),证明本模型具备有效性。
2. 有限元模型 L4-5ROM 的比较
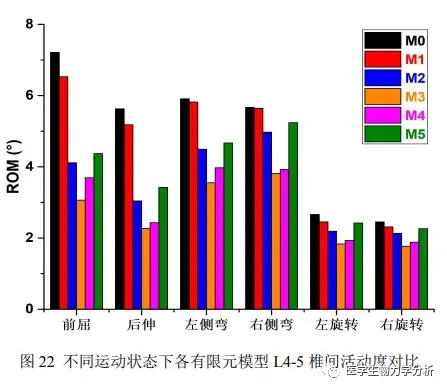
根据图 22,23 和表 2,3,可以得出以下结果:
(1)在所有运动状态下,M1、M2、M3、M4、M5 五组腰椎术后模型 L4-5 椎间相 对活动度(ROM)相较正常组模型(M0)均减小,将各模型按 ROM 值由大到小进行排 序为 M0,M1,M5,M2,M4,M3。M1ROM 最接近 M0,根据二者相较 M2 增量百分 比相减,M1 较 M0 降幅在 0.6%~16.55%之间。M3ROM 较 M0 下降幅度最大,按前述计 算原理可求得 M3 相较 M0 降幅在 31.92%~110.53%之间。
(2)M2 相较 M0 各运动状态下 ROM 下降 14.08%~85.20%,其中前屈和后伸时降 幅较大,分别为 75.43%和85.20%,右侧弯和右旋转时降幅较小,分别为14.08%和 15.02%;M2 相较 M1 各运动状态下 ROM 下降 8.45%~70.39%,其中前屈和后伸时降幅较大,分 别为 58.88%和 70.39%,左右旋转时降幅较小,分别为 11.87%和 8.45%。M2 相较 M3 各 运动状态下 ROM 升高 16.44%~25.55%,其中前屈和后伸时升幅较大,分别为 25.55%和 25.33%,左右旋转时升幅较小,分别为 16.44%和 16.90%。M2 相较 M4 各运动状态 ROM 升高 10.22%~21.13%,其中后伸和右侧弯时升幅较大,分别为 20.07%和 21.13%,前屈 和左侧弯时升幅较小,分别为 10.22%和 11.58%。M2 相较 M5 各运动状态 ROM 下降 4.01%~12.50%,其中后伸和左旋转时降幅较大,分别为 12.50%和 10.50%,左右侧弯时 降幅较小,分别为 4.01%和 5.43%。M2 各运动状态 ROM 虽大于 M3、M4 两组模型,但 M2 较 M0ROM 变化幅度远大于 M2 与 M3、M2 与 M4 之间 ROM 的变化幅度
3. 融合器应力值:
融合器应力值见上表 4,表 5 及图 24~30,研究对比五组手术模型不同工况下的 cage 等效应力值可以得到以下结果:
(1)M1和M2融合器应力峰值均在左旋转时达到最大,分别是12.7MPa和9.47MPa, M3 融合器应力峰值在右旋转时最高,为 8.09MPa,M4 和 M5 组椎间融合器应力峰值在 前屈状态下达到最大,分别是 20.6MPa 和 29.8MPa。M1、M2、M5 模型融合器应力峰值 均在直立状态下最小,分别为 4.18MPa、4.26MPa、11.2MPa。M3、M4 模型融合器应力 峰值均在后伸状态下最小,分别为 2.06MPa、5.99MPa。M3 在不同运动状态下的融合器 应力峰值均最小。
(2)除 M1、M2 的后伸状态,其余工况下的 M1、M2、M3Clydesdale 融合器应力 峰值均小于 M4、M5 的 Capstone 融合器。根据前述计算原理,后伸状态下 M1 融合器应 力峰值较 M4 大,前者较后者提升 49.32%,辅以单侧椎弓根钉棒固定后,这种应力上的 差距缩小,此时 M2 组融合器应力峰值较 M4 提升 8.83.%,在辅以双侧椎弓根钉棒固定 后的 M3 组,融合器的应力峰值较 M4 明显减小,M3 较 M4 下降 77.48%。
(3)除直立时,各运动状态下 M2 融合器应力峰值均小于 M1,后伸时二者应力峰 值差异较大,前者较后者减少 40.49%,前屈时差异最小,前者较后者减少 9.66%,直立 时二者差异不显著,前者较后者升高 1.88%
(4)各运动状态下 M2 融合器应力峰值均大于 M3,后伸时二者应力峰值差异较大, 前者较后者提升 68.65%,除后伸外二者应力峰值差异均不明显,右侧弯时前者较后者提 升 27.64%,左侧弯和右旋转时差异最小,前者较后者分别提升 5.61%和 4.03%。
(5)除后伸运动状态,各运动状态下 M2 融合器应力峰值均明显小于 M4,直立和 前屈时二者应力峰值差异较大,前者较后者分别减少 153.52%和 151.83%,后伸时二者 差异最小,前者较后者提升 8.83%
(6)各工况下 M2 融合器应力峰值均明显低于 M5,右侧弯时二者应力峰值差异较 大,前者较后者降低 303.73%,直立和后伸时差异最小,前者较后者分别下降 162.91% 和 164.84%。
4. 钉棒应力峰值
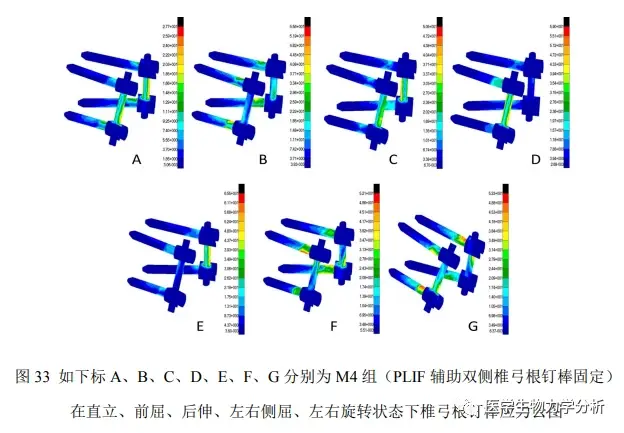
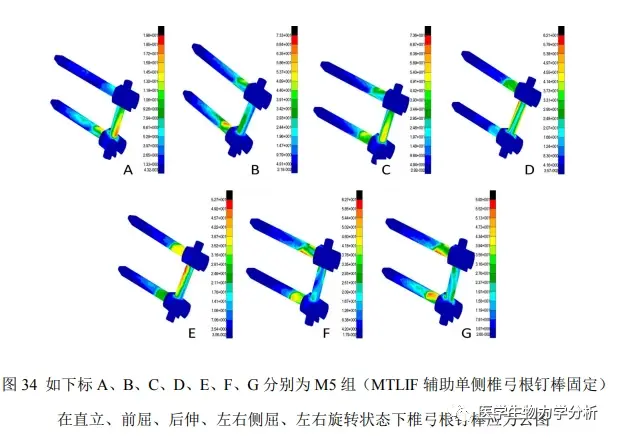
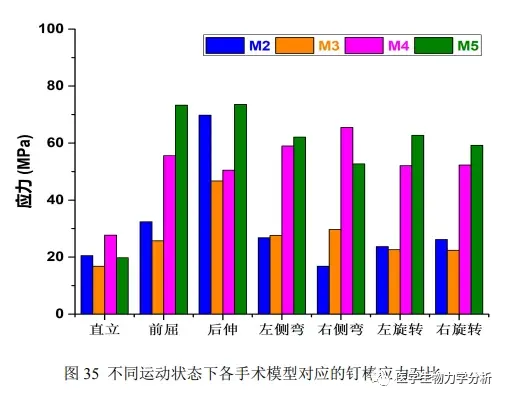
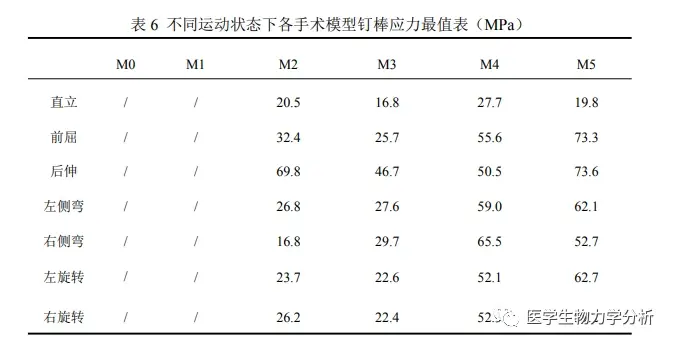
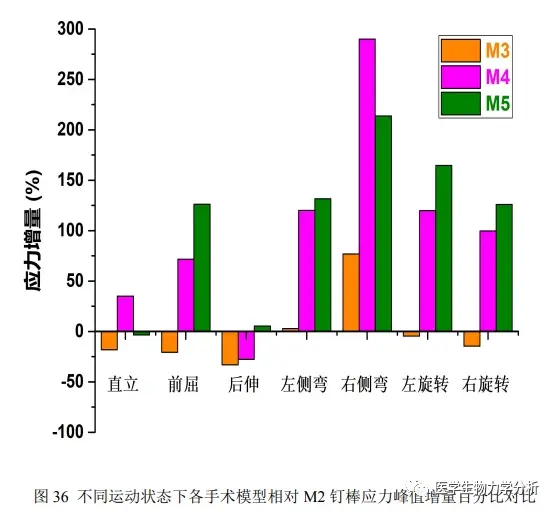
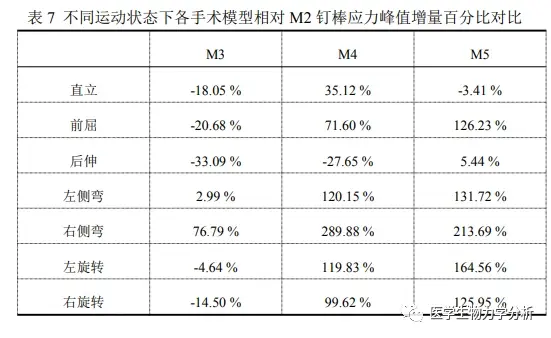
椎弓根钉棒应力值见上表 6,7 及图 31~36,研究对比四组手术模型不同工况下的钉 棒应力峰值可以得到以下结果:
(1)M2 及 M3 应力峰值均在后伸时达到最大,分别是 69.8MPa 和 46.7MPa,M4 钉棒应力峰值在右侧弯时达到最大,为 65.5MPa,M5 组钉棒应力峰值在后伸状态下达 到最大,为 73.6MPa。M2 钉棒在右侧状态下应力峰值最小,为 16.8MPa,M3、M4、 M5 钉棒均在直立状态下应力峰值最小,分别为 16.8MPa、27.7MPa、19.8MPa
(2)除左右侧弯状态,M2 各运动状态下钉棒应力峰值均大于 M3,其中后伸时前 者应力峰值较后者升高 33.09%,其它运动状态二者差异均不显著,左右侧弯时 M2 钉棒 应力峰值小于 M3,尤以右侧弯时差异相对明显,前者较后者减少 76.79%。
(3)除后伸状态,M2 各运动状态下钉棒应力峰值均明显小于 M4,其中右侧弯状 态下二者钉棒等效应力差距最大,前者较后者的减少 289.88%。直立时二者差距最小, 前者较后者减小 35.12%。后伸时 M2 钉棒应力峰值略高于 M4,前者较后者提升了 27.65%。
(4)除直立与后伸状态,M2 各运动状态下钉棒应力峰值均明显小于 M5,其中侧弯状态下二者钉棒等效应力差距最大,前者较后者减少 213.69%。直立和后伸状态下 两组模型钉棒应力差异不明显,前者分别较后者提升 3.41%和下降 5.44%。
(5)除左右侧弯状态,其余运动状态下 M3 钉棒应力峰值在四组附加螺钉固定的手 术模型中均最小。
讨论
1. OLIF 及 PLIF、MTLIF 有限元模型的建立与有效性验证
目前,临床应用最广泛的依然是以 PLIF 或 MTLIF 为代表的后路腰椎间盘融合术。然其不可避免地需要切除脊柱后柱结构,对后柱复合体及椎旁肌、尤其是多裂肌造成干 扰,相对于 OLIF、LLIF 等微创间接减压融合固定的术式而言,创伤大、出血多,对脊 髓及神经根产生牵拉与干扰、术后腰痛等并发症多等为其不足之处[20]。同时鉴于骨性结 构和脊髓等结构的阻挡,采用后路腰椎融合术无法置入较大的椎间融合器,而 OLIF 由 于其创新的手术通路(腹外斜肌和腹部大血管之间),给使用较大椎间融合器从而有效 地恢复椎间高度及脊柱矢状位序列提供了可能性[21],单独使用 OLIF 椎间融合器虽然对 一部分患者足以提供足够的椎间稳定性,然而对于骨质条件差,合并骨量丢失及骨质疏 松的患者,OLIF Stand alone 的应用有一定的限制,其为术后容易出现椎间融合器塌陷、 沉降和移位,往往需要附加前路或后路的内固定[22]。由于经典的后正中入路手术会给椎 旁肌(尤其是多裂肌)造成破坏,而 Wiltse 入路从多裂肌和最长肌间隙进入,避免了因 上述破坏造成的的肌肉坏死和失神经营养改变,是一种兼顾维护椎旁肌肉原位附着和有 效安全地处置责任病变节段的微创固定手术[23],将 OLIF 手术与单侧椎弓根钉固定 (Wiltse 入路)结合起来,既减少了双侧椎弓根螺钉固定的应力遮挡、手术创伤、手术 花费等问题,也保留了 Wiltse 入路的上述优。
目前有关 OLIFstandalone 与 OLIF 辅助单侧或双侧内固定对于手术节段稳定性的影 响的临床研究相对较少,OLIF 术式与传统 PLIF、TLIF 在手术节段稳定性对比的研究也 相对缺乏。本研究通过有限元分析方法,从生物力学的角度对 OLIF 附加单侧椎弓根钉 棒固定及其余四种手术方式进行对比研究,以期为 OLIF 手术在临床中的应用提供指导。
本研究脊柱有限元模型的建立是有限元分析技术的基础,模型的有效性是有限元计 算结果正确性的可靠保证。广义有限元模型的建立不仅包括几何模型的建立,还包括单 元类型的设置、材料属性赋予、载荷及边界条件的添加。本文使用的有限元分析方法与 绝大多数文献使用的方法相同,即原始数据的采集来源于 CT 图像,使用 Mimics 软件建 立初步的三维图像,然后联合 3-Matic、Geomagic Studio、Freeform、Hypermesh 及 MSC.Patran/Nastran 等软件完成有限元模型的后续关键处理,使其满足计算分析的必备 条件。本文五组腰椎融合术后模型是以正常人脊柱模型为基础建立的,模拟临床手术操 作中的减压范围和融合固定方式,置入 cage 和螺钉。本研究一共建立了 6 组有限元模型 即 L4-5OLIF Stand alone 模型、OLIF 附加左侧椎弓根钉棒固定模型、OLIF 附加双侧椎 弓根钉棒固定模型、PLIF 附加双侧椎弓根钉棒固定模型、MTLIF 附加左侧钉棒固定模 型及 L3-S1 正常脊柱有限元模型。在正常组脊柱模型基础上,施加与 Yamamoto、Zhitao Xiao 等体外实验及理论研究同等荷载及约束条件[17~19],来模拟不同计算工况下的模型各 脊柱节段相对活动度 ROM 值(前屈、后伸、左右侧屈、左右旋转等)。结合既往 Zhitao Xiao、Yamamoto 等人[17~19]理论研究和体外实验数据,经过对比椎体不同运动状态下的 ROM 值,对模型有效性进行验证。结果表明本实验正常组脊柱有限元模型在不同运动 状态下各脊柱节段 ROM 和所比较前人研究结果相近,误差相对较小(图 18~20),证 明本模型具备有效性,以该正常模型为基础的各腰椎融合术后模型可以进行进一步的力 学计算分析,计算结果具备一定的可性度。
2. 手术腰椎节段稳定性分析
脊柱节段的稳定,是指在生理载荷下,运动节段各结构能够维持正常的位置关系, 而不引起脊髓或神经根的损伤。如果脊柱丧失了这一功能,就称为临床失稳。脊柱的生 物力学稳定性与刚度成正比,与活动度成反比。生物力学计算中常使用相同的载荷和边 界条件下,椎体之间的相对位移大小来判断脊柱节段的稳定性。腰椎是人体承重的关键 部位,容易出现节段不稳引起腰椎退行性病变、腰椎滑脱症、腰椎侧弯等腰椎疾患。腰 椎融合术后,为营造良好的植骨融合环境,为病人的早期活动提供必要支撑,需要手术 节段的即刻稳定性,植骨融合完成后,为维持手术效果,减少疾病的复发,需要手术节 段的长期稳定性。腰椎融合术后,除脊柱自身结构外,多种复杂因素参与脊柱稳定性构 建。
从有限元分析结果可以得知,各运动状态下五组术后模型稳定性均较正常组模型有 所提高。各术后模型不同运动状态下稳定性由弱到强排序为:OLIF Stand alone,MTLIFOLIF 附加单侧椎弓根钉棒固定,PLIF,OLIF 附加双侧椎弓根钉棒固定。OLIF Stand alone 模型组手术节段稳定性相较其余 4 组术后模型更加贴近于正常模型组,稳定性仅提高 0.6%~16.55%。由于 OLIF 相较 MTLIF、PLIF 最大限度的减少了对人体正常解剖结构的 干扰,Stand alone 术式减少了额外螺钉固定引起的的手术节段刚度增加,这和我们临床 观察到的现象是相符的。然而本研究假设模型为融合器与终板发生骨性融合后的状态, 而非术后即刻状态。术后早期,随着椎间融合器植入,手术节段未实现骨性融合,其即 刻稳定性的实现得益于椎间隙的撑开,周围韧带软组织充分牵张,产生对椎间融合器足 够压缩力,即:牵张-压缩原理[24]。此时融合器和椎体上下终板间是有相对滑动的,融 合器能使手术节段控制一定的轴压载荷,为脊柱前中柱提供相对稳定性,其控制分离牵 张和旋转载荷能力差。手术节段实现植骨融合后,cage 相对上下终板无滑动,融合器控 制各方向运动能力增强。由于融合前后,手术节段的稳定性仍会表现出巨大差异[25],我 们可以合理推测,OLIF Stand alone 术式单纯置入融合器而未附加螺钉固定在手术即刻状 态下,其手术节段的椎间稳定性相较正常人差。故对于存在骨质质量差、手术节段不稳 或术中不慎损伤终板者,单纯置入融合器易造成手术失败,应额外增加后路固定增加手 术节段稳定性,为早期的植骨融合提供稳定的力学环境[26]。
OLIF 增加了单侧椎弓根钉棒固定后,各运动状态下 L4-5 椎间稳定性进一步提升, 各运动状态下相较正常模型增幅范围在 14.08%~85.20%之间;OLIF 单侧椎弓根钉棒固定 相较 MTLIF 各运动状态稳定性增加 4.01%~12.50%,其中后伸和左旋转时稳定性提升幅 度较大,分别为 12.50%和 10.50%,左右侧弯时增幅较小,分别为 4.01%和 5.43%。由于 MTLIF 单侧椎弓根钉棒固定模型需要切除一侧关节突关节及同侧半椎板,椎间盘减压范 围较 OLIF 大,融合器体积也较 OLIF 小。研究表明,半椎板切除使腰椎丧失 20%抗扭 转能力[27],单侧关节突关节的破坏会影响腰椎的抗扭转前屈能力[28,29]。而 OLIFClydesdale 椎间融合器相较 Capstone 融合器较为宽大的设计增加了 cage 上下面与终板的接触面积, 前后墙不等高,上下面成 6 度夹角的坡度设计,使得 OLIF 手术病人在术后能够恢复腰 椎的生理前凸,有效提高椎间隙高度,改善腰椎序列,同时拉伸后纵韧带和黄韧带[30], 放大牵张-压缩功能。故二者稳定性表现出一定的差异,可能与上述因素有关。OLIF 单侧椎弓根钉棒固定模型稳定性次于 PLIF,相较 PLIF 各运动状态稳定性减少 10.22%~21.13%,其中后伸和右侧弯时减少幅度较大,分别为 20.07%和 21.13%,前屈和 左侧弯时减少幅度较小,分别为 10.22%和 11.58%。由于 PLIF 模型双侧螺钉固定较 OLIF 单侧螺钉固定增加了手术节段的刚度,减少了单侧螺钉固定引起的耦合运动效应,故 PLIF 组稳定性优于 OLIF 。
OLIF 辅助双侧螺钉固定模型组在不同运动状态下的 L4-5 椎间稳定性相较其余四组 术后模型最佳。各运动状态下 OLIF 辅以双侧钉棒固定与单侧钉棒固定相比,螺钉数量 的增加提高了手术节段的刚度,使得稳定性进一步提高,升高 16.44%~25.55%,其中前 屈和后伸时升高幅度较大,分别为 25.55%和 25.33%,左右旋转时升高幅度较小,分别 为 16.44%和 16.90%。OLIF 双侧钉棒固定与 PLIF 相比,前者不同运动状态下稳定性均 高于后者,尤以前屈时明显,稳定性提高 15.33%(两者 ROM 相较 OLIF 单侧椎弓根钉 棒固定组增量百分比相减)。由于 PLIF 双侧椎弓根钉棒固定模型需要切除后方韧带复 合体(Posterior ligament complex,PLC)和两侧全椎板,椎间盘减压范围也明显广于 OLIF, 融合器体积较 OLIF 小,根据生物力学研究表明,后方韧带复合体结构的张力带效应在 维持脊柱后柱稳定中具有重要作用,PLC 的破坏伴随着张力带力学性能的丢失,脊柱在 前屈时的稳定性会明显下降[31],而全椎板切除会使腰椎旋转稳定性下降 27%[27]。故 OLIF 双侧椎弓根钉棒稳定性优于 PLIF 的结果与前人研究结果一致。
OLIF 单侧椎弓根钉棒固定模型所有状态下稳定性远高于 OLIF Stand alone,强于 MTLIF,虽然 OLIF 单侧钉棒固定模型组的稳定性相较 OLIF 双侧椎弓根钉棒固定与 PLIF 模型稳定性欠佳,但相较正常组模型,其稳定性已大幅度提升,升高 14.08%~85.20%, 分别在前屈后伸时提升 75.43%和 85.20%,其右侧弯和右旋转时稳定性也略有提升,分 别为 14.08%和 15.02%。稳定性提升幅度远超 OLIF 辅助单侧椎弓根钉棒固定较 OLIF 辅 助双侧椎弓根钉棒固定或 PLIF 的变化幅度,且双侧钉棒固定与单侧钉棒固定相比,增 加螺钉数量维持过于坚强的内固定,会导致其邻近节段的活动度进一步增加[32,33],PLIF 手术 PLC 的去除,也会增加邻椎病发病风险[34]。所以结合稳定性进行综合考量,OLIF 辅以单侧椎弓根钉棒固定既减少了螺钉固定的数量和组织结构的破坏,同时也能达到较 好的稳定性。
3. 各手术模型植入器材的应力分析
应力,物体由于外力而变形时,在物体内各部分之间产生相互作用的内力。有限元 分析所计算的应力主要指 Von Mises Stress,又叫 Mises 等效应力、应力峰值、最大应力 值,其原理是利用应力云图来表示模型内部的应力分布状况,从而使模型中的最危险区 域可以快速得到确定。屈服强度是金属材料发生屈服现象时的极限,即为抵抗微量塑性 变形的应力。超过屈服强度的外力作用,将会使受力物体发生不可逆变化。本研究建立 的五种腰椎融合术后模型均有椎间融合器和(或)椎弓根钉棒系统的参与。融合器沉降 是椎间融合术后的一种常见并发症,前人研究结果显示,融合器沉降率随着上下接触终 板应力的增高而升高[35]。在有限元分析中,常采用融合器接触上下终板应力作为观察融 合器沉降率的指标,但也有人采用融合器应力峰值作为间接反映终板应力变化的指标 [8,36]。除此之外,融合器应力过高还会引起应力遮挡效应,应力峰值低可以减少应力遮 挡,为早期的植骨融合提供良好的应力刺激[37]。
从前人研究结果中我们可以获知,钛合金螺钉的屈服强度为 897~1034MPa [36], PEEK 椎间融合器的拉伸屈服强度为 96.9MPa,压缩屈服强度为 118MPa [38],从有限元分 析结果可以得知,钉棒应力峰值最高值出现在 MTLIF 的后伸状态,达 73.6MPa,cage 应力最高值在 MTLIF 的前屈状态,达到 29.8MPa,各有限元手术模型不同运动状态下融 合器与钉棒的应力峰值均较其屈服强度小。我们将其归因于本实验建立的五种手术模型 皆为实现植骨融合后的模型,且螺钉钉棒和椎间融合器各自分担了一部分应力,故各手 术模型螺钉和融合器难以达到其屈服强度。由于提供较大的 Clydesdale 融合器,除后伸 状态,各运动状态下 OLIF Stand alone 融合器等效应力相较传统 Capstone 融合器显著下 降。后伸时其融合器应力超过其余手术模型,达 9.23MPa,仅次于 MTLIF,考虑该现象 与 Clydesdale 椎间融合器前后侧墙不等高的坡度设计导致 cage 邻近椎间盘四区部分分担 的应力较小有关。所以 OLIF Stand alone 手术后,病人应尽量避免做腰部后伸动作。
OLIF 增加了单侧椎弓根钉棒固定后,所有运动状态下融合器应力出现一定幅度下 调,虽直立状态下 OLIF 单侧椎弓根钉棒固定组融合器应力峰值略高于 OLIF Stand al但差异不显著。辅以单侧螺钉固定后,后伸状态下 OLIF 融合器应力峰值较 OLIF Stand alone下降了40.49%,良好的解决了OLIF融合器应力峰值在后伸状态下应力较大的问题。此时 OLIF 单侧椎弓根钉棒固定模型 cage 应力峰值在后伸时虽高于 PLIF 模型,差异已 不明显,前者较后者应力提升 8.83%。辅助双侧椎弓根钉棒固定后,OLIF 手术模型 cage 应力均较 PLIF、MTLIF 模型组降低。椎弓根钉棒应力方面,直立和后伸状态下 OLIF 单 侧椎弓根钉棒固定和 MTLIF 钉棒应力峰值差异不明显,前者分别较后者升高 3.41%和降 低 5.44%,后伸状态 OLIF 单侧椎弓根钉棒固定组钉棒应力峰值大于 PLIF,前者较后者 提升 27.65%。上述现象可通过 cage 形状关联运动状态进行合理解释。除外少数变异情 况,OLIF 单侧椎弓根钉棒固定组各运动状态下钉棒及融合器应力峰值均较 PLIF、MTLIF 传统手术组降幅明显,降幅在 100%以上的运动状态居多,考虑一方面由于 OLIF 融合器 体积较传统融合器大,可以良好的解决融合器应力集中问题,cage 和椎弓根钉棒之间可 以更好地相互分担应力[8],另一方面我们将其归因于 PLIF 切除了 PLC 和双侧全椎板, MTLIF 切除了一侧关节突关节和同侧半椎板,原本集中在后方韧带复合体、椎板或关节 突关节部位的应力重新分布,使得传统手术模型组钉棒和融合器承担了更多的应力[31]。由此我们可以认为 OLIF 单侧椎弓根钉棒固定融合器发生沉降的可能性较 PLIF、MTLIF 可能性小[35],且因减少了应力遮挡效应,融合器周围骨组织能够得到充分的应力刺激[37], 植骨融合率可较传统手术增高。同时钉棒发生疲劳断裂的可能性也较少。
除左右侧弯时的钉棒应力峰值,OLIF 辅助双侧螺钉固定各运动状态融合器和钉棒应 力峰值均最小。各运动状态下 OLIF 辅以双侧钉棒固定与单侧钉棒固定相比,融合器和 钉棒应力峰值进一步下降,后伸时 OLIF 双侧钉棒固定组 cage 应力峰值较单侧钉棒固定 组下降了 68.65%,钉棒应力值下降了 33.09%。左侧弯时前者钉棒应力峰值略大于后者, 但差距不明显,右侧弯时 OLIF 双侧椎弓根钉棒固定组钉棒最大应力值较单侧椎弓根钉 棒固定组提升 76.79%,其原因或与单侧椎弓根钉棒固定腰椎节段系统内在的不平衡导致 的应力重新分布有关。比较 OLIF 各手术模型之间椎弓根钉棒和 cage 的应力峰值之间的 差异发现组间变化幅度均在 100%以下,相较 OLIF 单侧椎弓根钉棒固定模型组与 PLIF、 MTLIF 组之间的差异,OLIF 模型组间融合器和椎弓根钉棒应力差值均不显著。
鉴于 OLIF 手术较传统手术在钉棒和椎间融合器应力峰值降低方面的优势,从生物 力学角度分析,在取得同等或相近稳定性的前提下,OLIF 手术方式应作为手术治疗的最 佳选择。OLIF Stand alone 后伸时融合器应力峰值较大,需要辅以钉棒固定以减少融合器 应力峰值,附加双侧固定后,融合器和钉棒最大应力值均最低,但螺钉固定的加强导致 的手术节段刚度的提高,必然伴随应力遮挡效应放大[39,40],邻近节段椎间盘和小关节的 载荷升高等问题,其远期并发症诸如固定节段骨质疏松、邻椎病的发生率将会显著增加 [41]。故刻意追求降低差异并不显著的应力值,相较其所带来的并发症,并非最优选择, 故将生物力学和临床结合起来考量,较少螺钉固定的 OLIF 辅助单侧椎弓根钉棒固定是 五组手术模型中的最优选择。
4 本研究的局限不足
虽然在脊柱生物力学研究中有限元分析法相较体外实验具有诸多优点,但该研究模 型还无法与人体结构达成完美的一致,比如模型本身具备个体差异性,建模时未将肌肉 纳入考虑,受力分析与形态学之间的结构取舍有待进一步检验;人体组织是由复杂的生 物活性结构组成的,其材料属性赋值我们参考了国内外文献参数,和实际的数值相比可 能存在出入。椎间盘是典型的非线性结构,其形态变化不固定,使用线性结构实现椎间 盘的模型化,其力学特性与人体实际情况有差别。本模型使用结构体代替小关节软骨, 使用线弹簧结构替代韧带,这种舍弃原有形态学基础的人体结构替代品是否具备良好的 力学传导,还需不同的模型加以验证。OLIF 减压范围设计为去除 L4-5 椎间盘 2、3 区结 构时不保留右侧纤维环是为了简化模型方便计算。有限元模型计算的结果仅仅体现患者 术后某一瞬时的状态,而人体脊柱结构发生变化的过程还夹杂着自然退变等因素的干扰, 故计算结果仅能作为一种趋势的反映,要想作为数据成为临床研究与治疗的准确参考, 还需结合体外实验结果进行综合分析,这也是理论研究的不足之处。
结论
2. OLIF 辅助单侧椎弓根钉棒固定模型手术节段稳定性优于 OLIF Stand alone、MTLIF 辅 助单侧椎弓根钉棒固定模型,略差于 OLIF 辅助双侧椎弓根钉棒固定模型及 PLIF 辅助双 侧椎弓根钉棒模型。
3. OLIF 辅助单侧椎弓根钉棒模型可以为相应融合固定节段提供足够的椎间稳定性。
免责声明:文章仅供学习交流,版权归原版作者所有,如涉及侵权请联系删除
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















