















































软件

产品


来源:ETA迪艾 作者:3DCS团队
3DCS FEA Compliant Modeler柔性模块采用有限元方法精确仿真零件制造和装配过程的偏差变化,用于分析不同公差状态下,零件施加过约束、夹持、重力、温度场、扭矩等载荷时,变形偏差对产品质量目标的影响,常用于汽车侧围、前后保、机盖、翼子板、内饰;飞机机身蒙皮、机翼、尾翼;电子产品板件等易变形的柔性件。
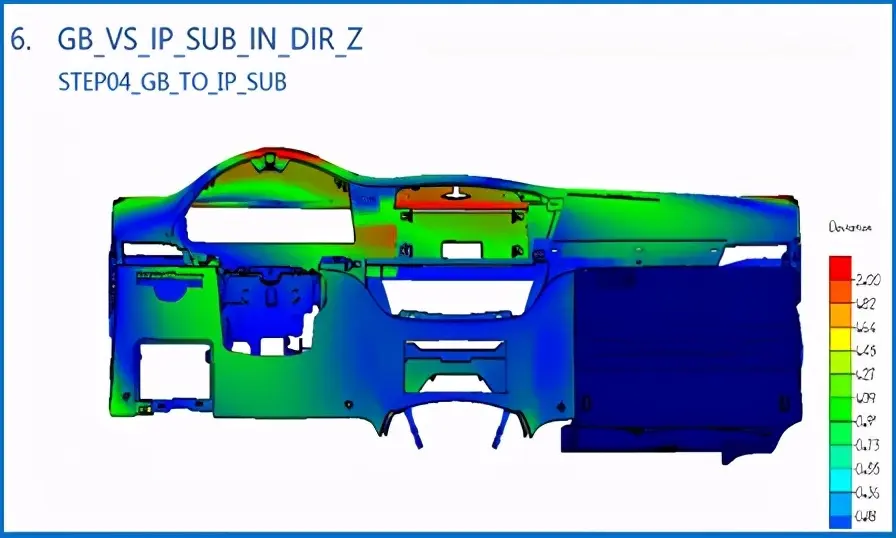
左一:FEA_CM在IP&CCB装配分析中的应用
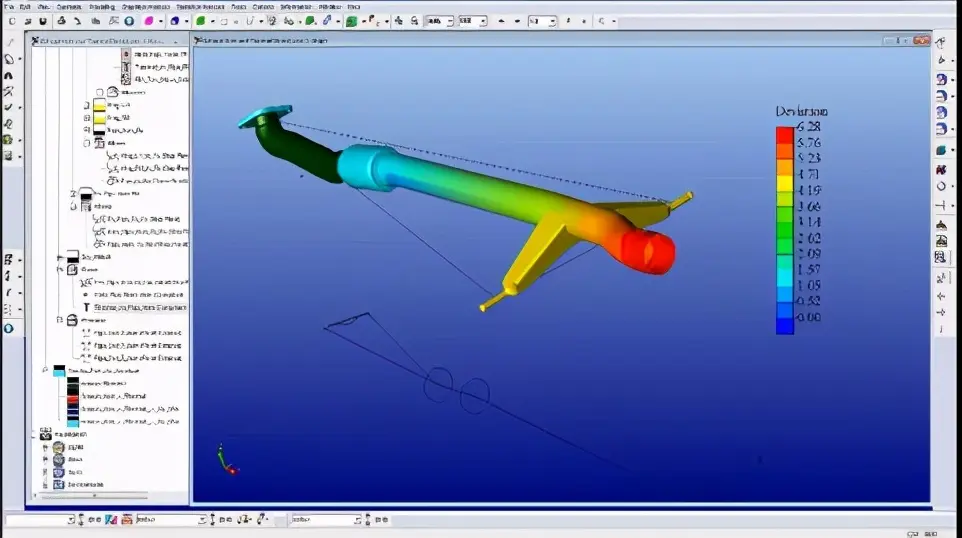
右一:FEA_CM在排气管温度场分析中的应用
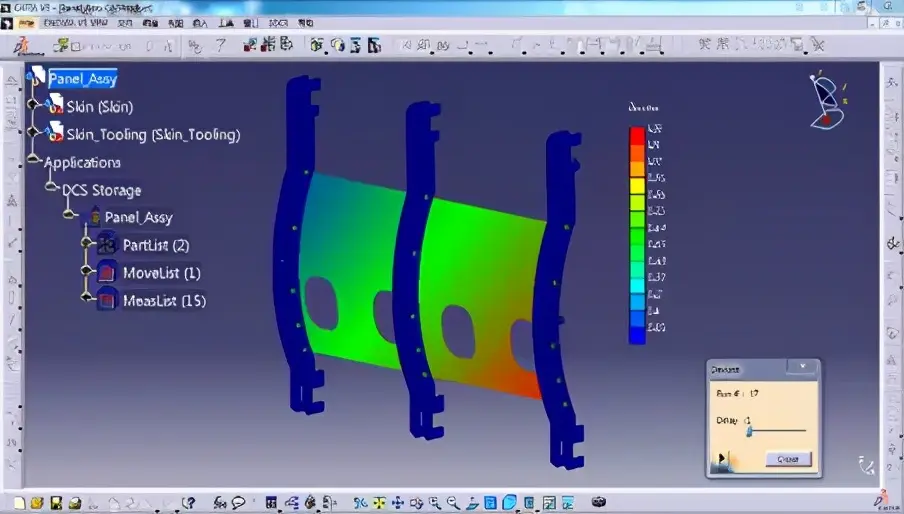
左二:FEA_CM在飞机蒙皮工装定位中的应用
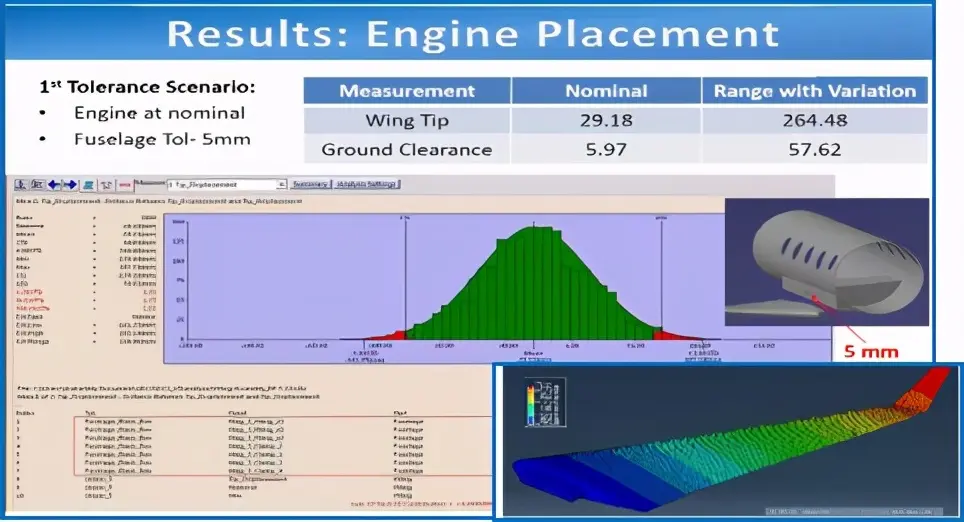
右二:FEA_CM在机翼离地间隙分析中的应用
3DCS柔性模块分析需要使用柔性模块的装配命令,以下为3DCS柔性模块建模分析的最佳建模方法流程:
1
创建初始刚体模型
根据模型的质量目标,使用3DCS基本模块的装配、测量与公差创建初始刚体模型,其中,装配可以理解为初始预定位,先将对应的零件放至理论位置,在之后将添加夹持、过约束等柔性载荷。
2
创建柔性模型点
确定上一步的刚性模型中,哪些零件将作为柔性零件分析。对于这些柔性件,创建额外的DCS点用于创建夹持,连接,力载荷等(这些点有的已经存在于刚体模型)。除了这些模型分析必需点之外,在零件上创建任意额外的DCS建模点作为辅助点,以便进行视觉弯曲和额外的验证测量(Feature Point-On Mesh批量建点)。
3
划分网格,得到网格文件
划分网格,得到网格文件使用FEA网格软件,为每个柔性零件创建一个网格文件(Hypermesh,ABAQUS,Presys等)。
4
生成FEA矩阵文件
在3DCS Stiffgen窗口选择求解器可执行文件,如abq6141.exe或Nastran.exe,Stiffgen也可以调用.bat文件,选择设置后,3DCS将通过调用相应的求解器内部生成得到所需的缩减刚度矩阵,质量矩阵和温度场矩阵文件等。同时,3DCS会自动生成更新的网格文件,其中包含有限元节点集ASETS(将3DCS模型点与最近的有限元网格节点自动关联)。
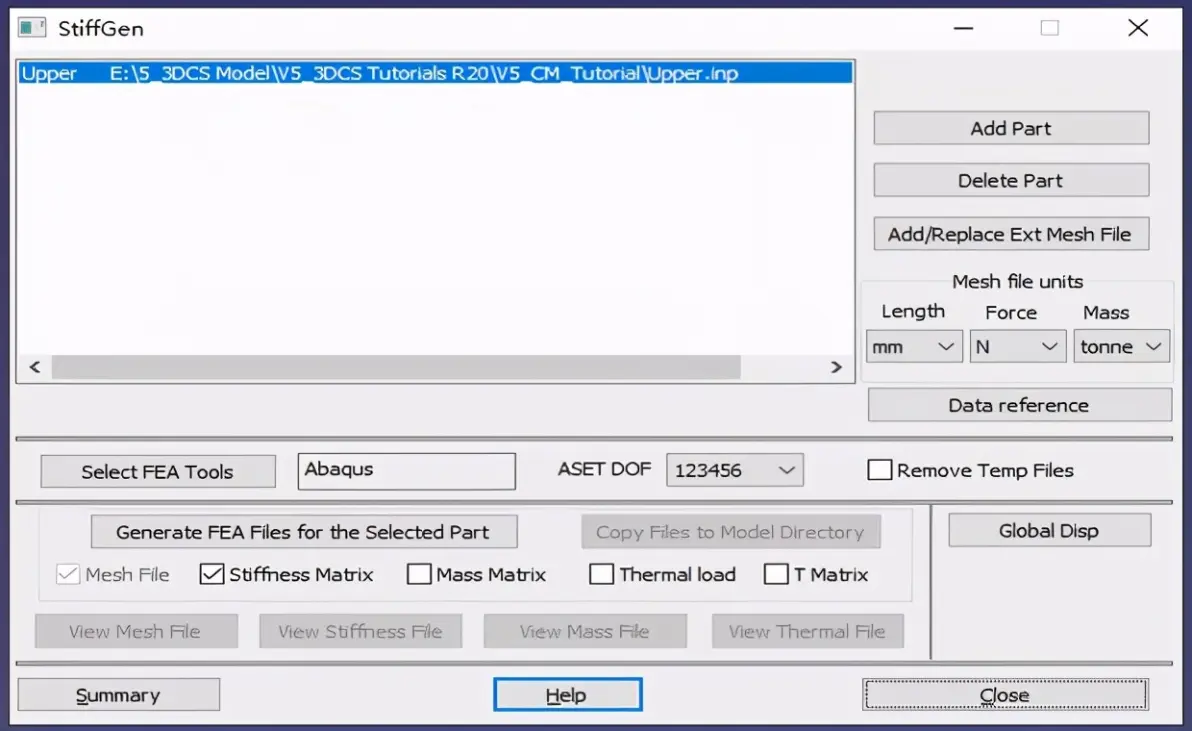
3DCS StiffGen 窗口
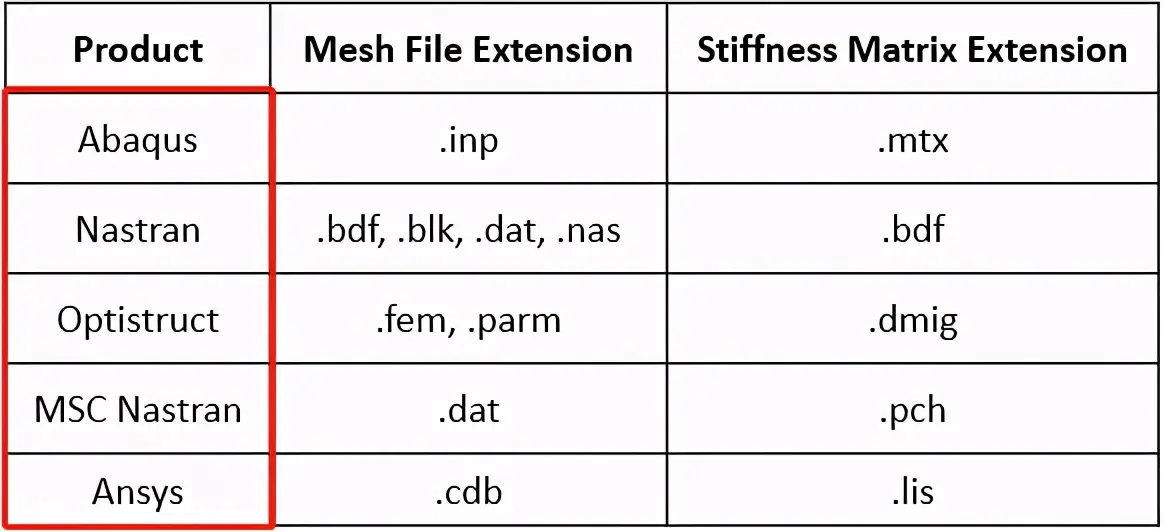
FEA_CM支持的网格文件与求解器文件格式
5
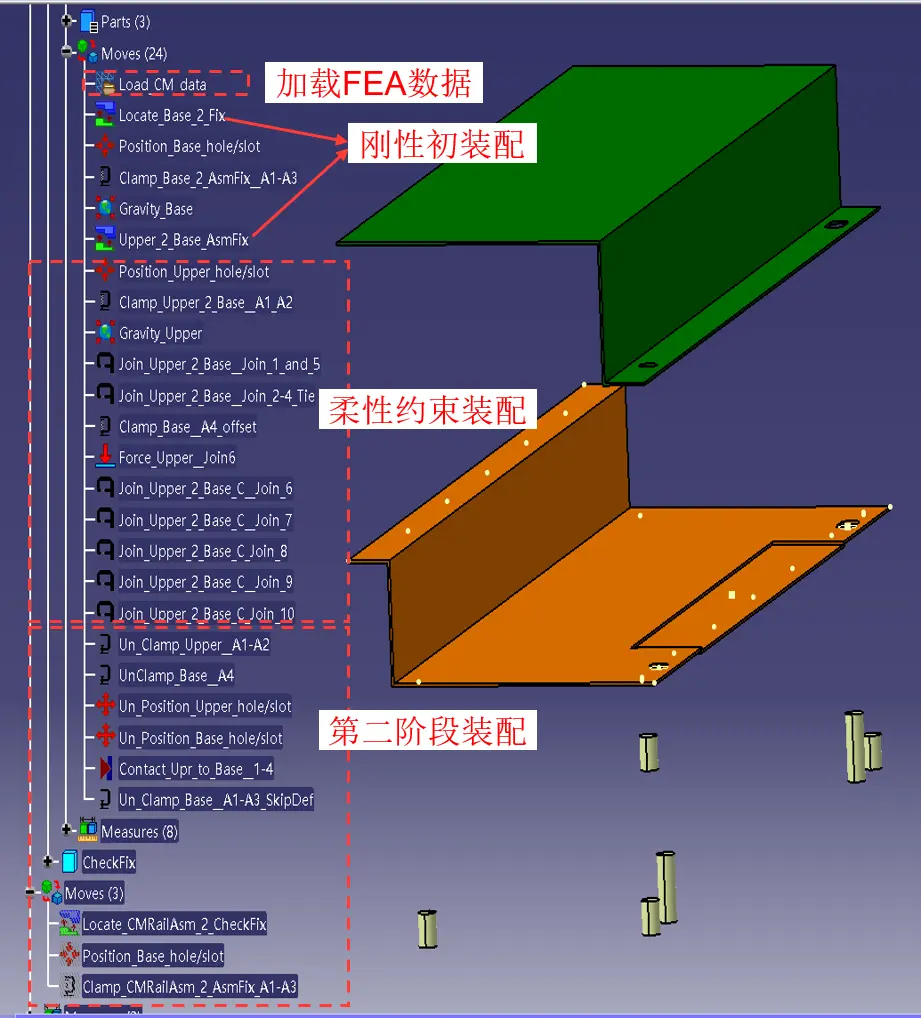
加载FEA矩阵文件
创建Load FEA Data装配,将第4步得到的网格和矩阵文件加载至3DCS模型,加载后,需要点击Nominal Build将网格的Asets节点集与3DCS模型点自动关联。
6
约束零件,添加载荷
这是基于每个产品装配顺序的特定建模操作,零件可以定位在空间,夹持至夹具或点焊连接至对手件。所有装配完成后,零件必须充分约束。一个装配中,可以同时使用Hard Clamp和Soft Clamp,一般推荐在三个主平面定位上使用Hard Clamp,在其他定位位置使用Soft Clamp,方便起见,也可以将其分开为两个装配。
创建其他柔性装配,如重力,点焊/铆接连接、力载荷、温度场等,这些装配应该添加在已完全约束的零件上。
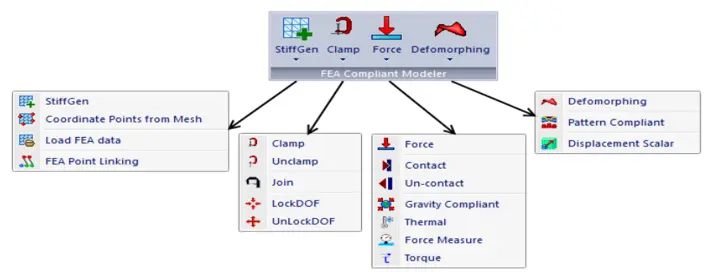
FEA_CM柔性模块工具栏
有时,需将连接为整体的产品/分总成从夹具松开(考虑回弹),进入下一道工序定位。
开始第二阶段分析
7.1 Unposition松开所有定位点
从第一个夹具上Unclamp松开夹持零件,但保持三个点夹持。这些(三个)点应在以后的阶段(如果适用)用于夹紧零件。松开夹持的点将相对于夹持点产生回弹。对于3-DOF的刚度矩阵,三个点构成的平面通过Hard Clamp就可以完全约束零件,对于6-DOF的刚度矩阵,一个点通过Hard Clamp就可以完全约束零件。用户在Unclamp松开零件时应注意,以免零件约束不足。
7.2 Skip Deformation下松开最后定位点
该设置将保证零件在不变形的情况下松开最后的定位点约束(前一步已完全释放回弹),产品将保持该形状(变形)至进行下一阶段装配。
7.3 使用基本模块装配将产品定位至新位置
7.4 将上一步产品/分总成Clamp夹持至第二个工装夹具(对手件)
7.5 为该阶段添加其他柔性约束…
提高柔性模型分析效率的小建议
8.1 如果流程允许,使用较少的柔性装配
柔性变形计算是基于依次每一步的装配,装配较多将使模型分析时间增加。可以在同一个装配中进行更多操作来缩短计算时间,如在一个装配中固定多个零件。
8.2 生成装配方向的刚度矩阵
虽然CM支持旋转部件,但这需要对矩阵进行变换来调整刚度矩阵的方向,增加了计算成本。如果在设计方向上建立刚度矩阵,则可省去由转换刚度矩阵触发的计算。
8.3 删除无用的模型点
模型点数量减少将使得刚度矩阵文件更小 。第4步生成的矩阵文件为基于建模点的缩减刚度矩阵(为了提高模型分析效率),模型中点越多会使缩减矩阵文件越大,第2步创建额外的DCS辅助点仅用于可视化显示,如果板件较小或对可视化无要求,可以不创建DCS辅助点,不会影响最终Measure的分析结果。
8.4 建模过程如有新增装配点、测量点
由于新增点无有限元点属性信息,需要回到第4步重新生成缩减刚度矩阵(此时矩阵中包含这些新增点的有限元信息),第5步重新加载新的刚度矩阵。
8.5 Soft Clamp与Position和Hard Clamp相比计算机计算量更大
Position和Hard Clamp通过约束已有的自由度,而Soft Clamp是在刚度矩阵上添加额外的约束。
FEA_CM柔性板件焊接连接示例
3DCS从入门到精通系列直播课
3DCS作为领先的三维尺寸公差分析软件,已经在汽车、航空航天、电子产品、机械重工等行业得到广泛的应用。
为了更好的帮助大家学习3DCS,ETA携手技术邻将开展十期《3DCS从入门到精通》直播课,旨在为广大用户提供系统的培训指导以及案例分享,推进3DCS在产品研发及制造等阶段的应用。

月月都将会有热门仿真直播课与大家见面,目前已开放首期直播《3DCS NX/Creo版基础入门》报名通道,欢迎报名参与~
01
直播时间
4月26日 15:00
02
适用人群
尺寸工程师,结构工程师,匹配工程师,工艺工程师等产品及工艺设计人员
03
讲师介绍
卢少阳
西北工业大学硕士,就职于ETA-China,负责3DCS三维尺寸公差分析及QDM质量数据管理平台的培训及项目实施,服务客户涉及汽车、航空航天、电子家电、军工、机械重工、通信等众多领域。
04
主要内容
1.最新CAD平台集成介绍
2.3DCS分析原理简介
3.3DCS Creo/NX版界面介绍
4.3DCS Creo版基于特征的模型创建
—创建Feature Move;
—定义GD&T;
—创建Feature Distance Measure;
5.3DCS NX版基于点的模型演示
—Move、Tolerance、Measure演示
打开“技术邻”APP,点击首页“直播”即可参与
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















