















































软件

产品


Step0 前言
这一篇文章,我们将通过添加仿真序列的方式,实现码垛逻辑,仿真序列即基于事件的响应逻辑。在连接编写PLC之前,通过仿真序列,可以对模型逻辑有一点的认识,写PLC就比较快速,同时有时候需要搭配仿真序列来做,所以有必要先写一下仿真序列。
上一篇文章中,我们生成盒子是基于时间,不受控制,我们想盒子碰到碰撞传感器,即到位后,就停止生成盒子,同时传送带停止运动。
首先,将盒子对象源改变每次激活时生成1个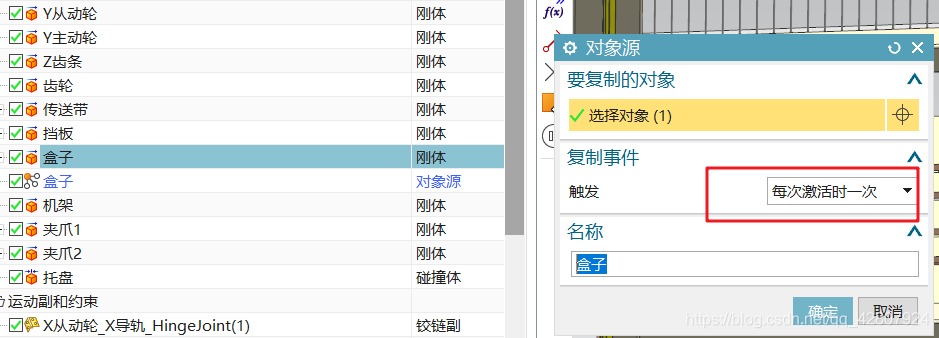
传送带逻辑,添加一条仿真序列,机电对象即要控制的对象为传输面,条件对象为传送带,勾选速度,并修改线速度为100mm/s,指定轴矢量,并命名,逻辑为当传送带为false即未触发时,传送带运行,速度为100mm/s。运行持续时间都可以设为0。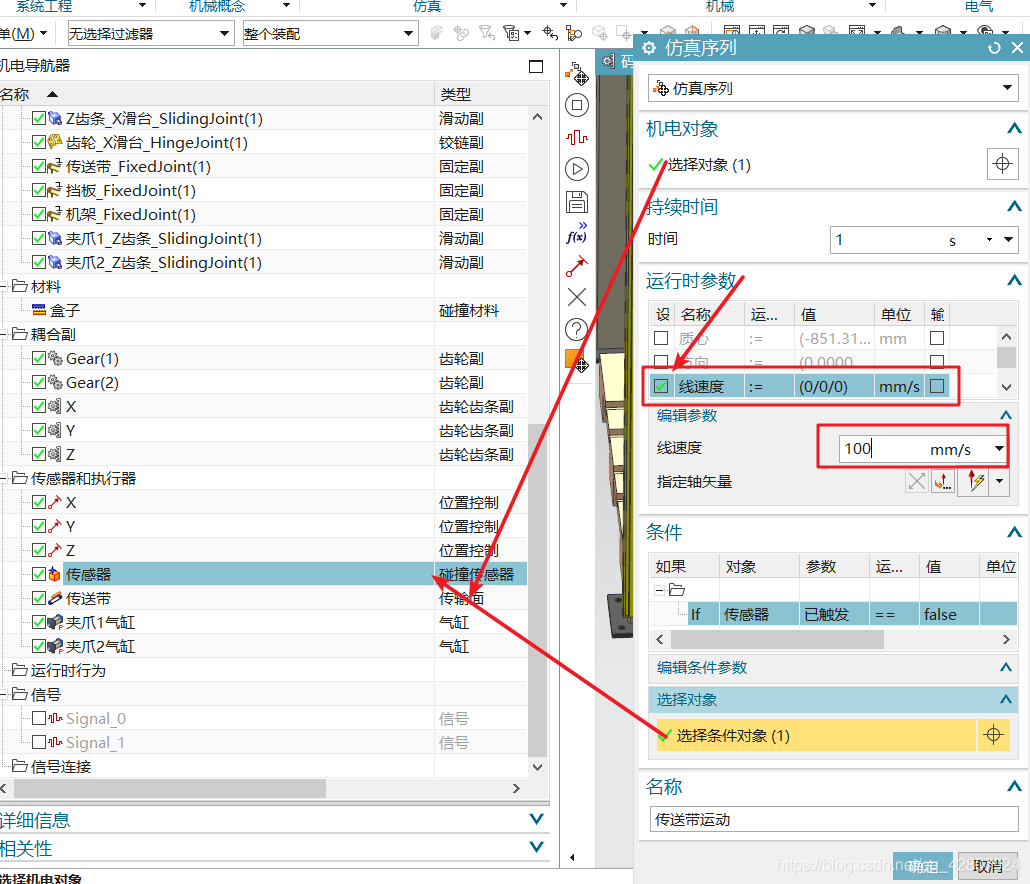
在序列编辑器中即可看到这条序列。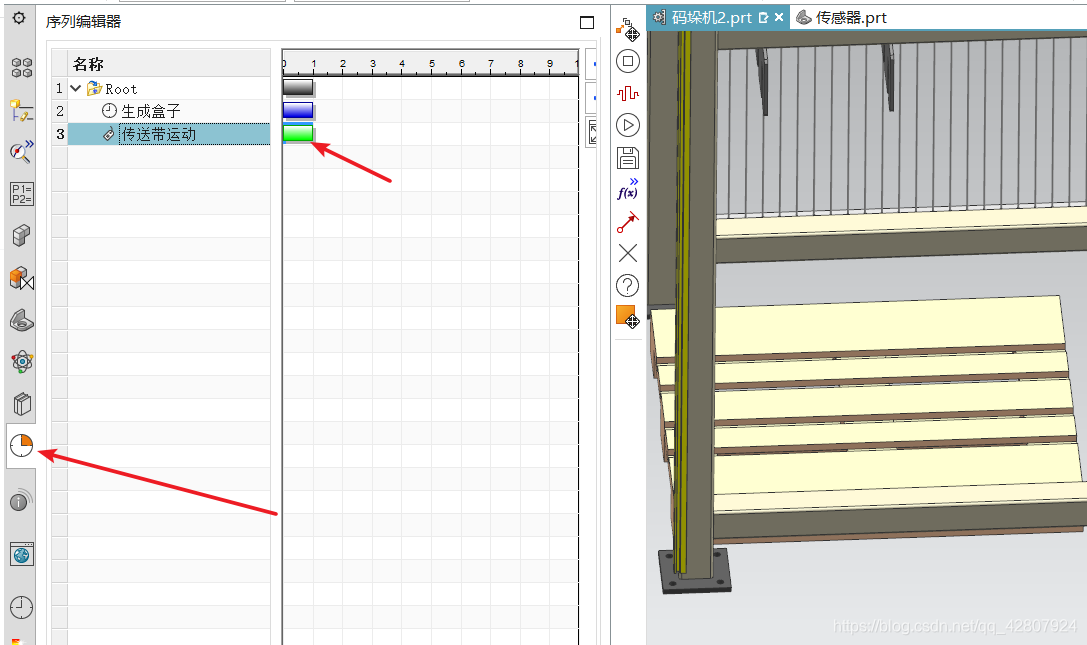
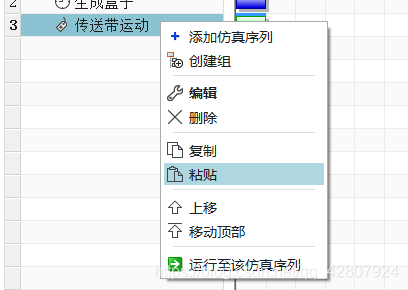
右键复制粘贴,添加仿真条为当传送带为True即触发时,传送带停止运行,速度为0mm/s。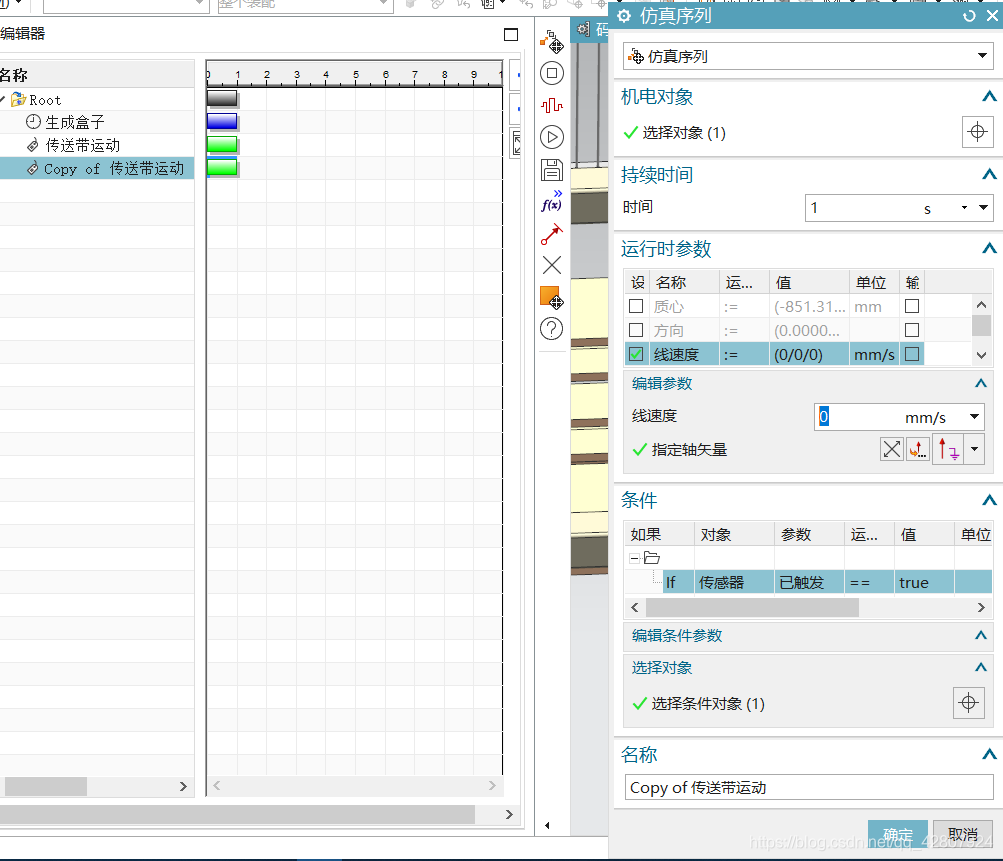
添加生成盒子仿真序列和停止生成仿真序列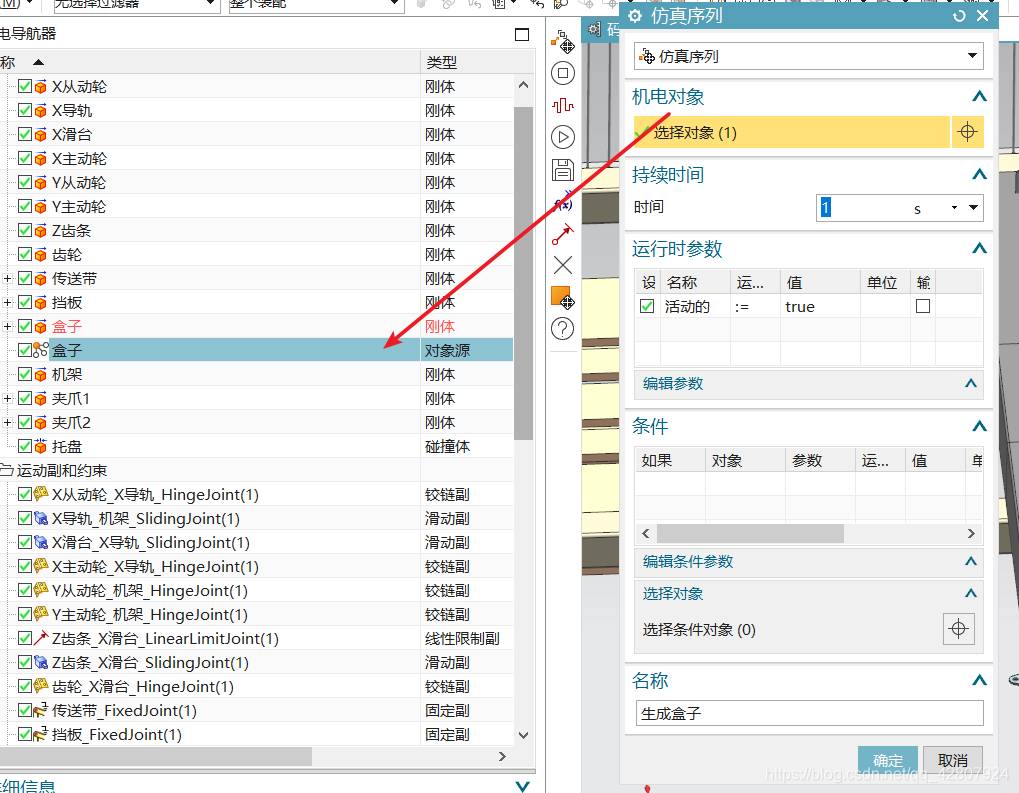
通过左键拉线的方式,连接序列条,定义发生顺序,当时间走过该序列条并满足运行条件,其就会运行。
到位即停止,提走后又生成,运行效果如下
把先前的位置控制中目标值都设为0,否则和仿真序列中语句会发生冲突。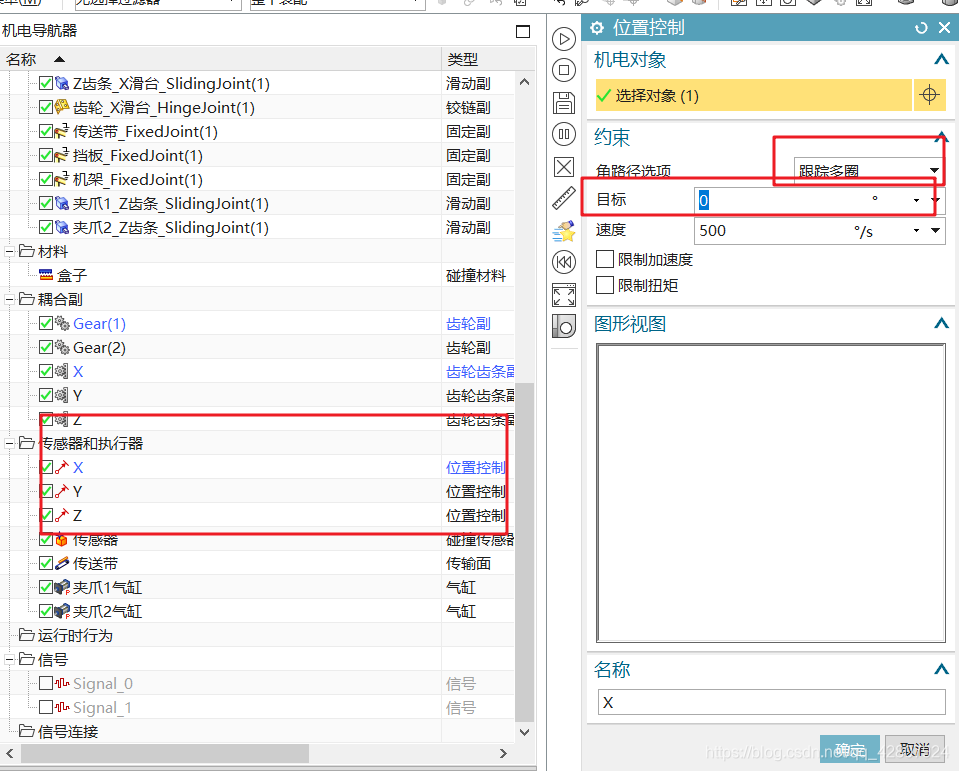
然后分别添加轴运动到目标位置的仿真序列,给定位和速度,,这端逻辑是当盒子到位后XY同时运动到取垛位,而后气爪张开,然后Z轴,下降,效果如图,对于夹爪的配置,我在做的过程发现大有文章,所以接下来会讲到。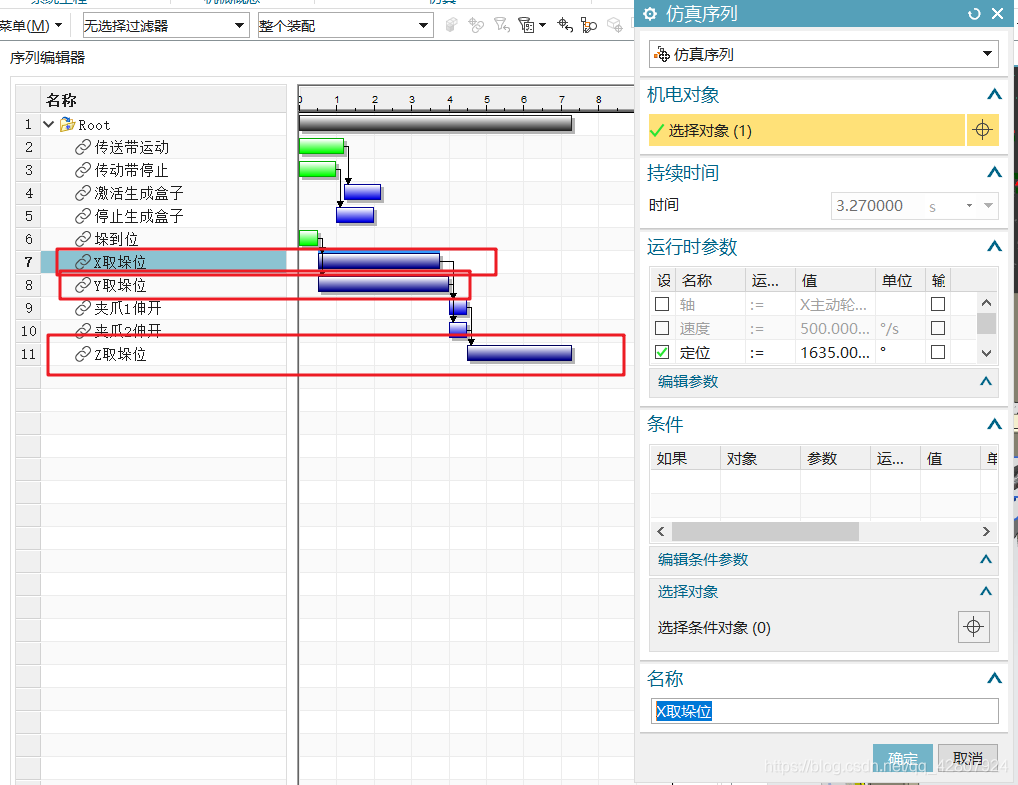
暂时效果,夹爪未能控制,下面再讲到
要想实现气缸的功能,最简单是为滑动副添加线性位置控制,而需要模拟真实工况就需要添加气缸以及气动阀,开始尝试了气缸的方式,但没有成功,放到后面去了,这里是位置控制模式
同样为气缸滑动副添加位置控制,添加仿真序列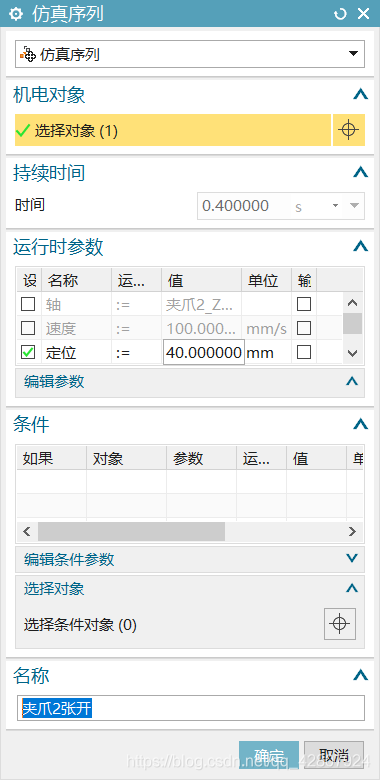
添加仿真序列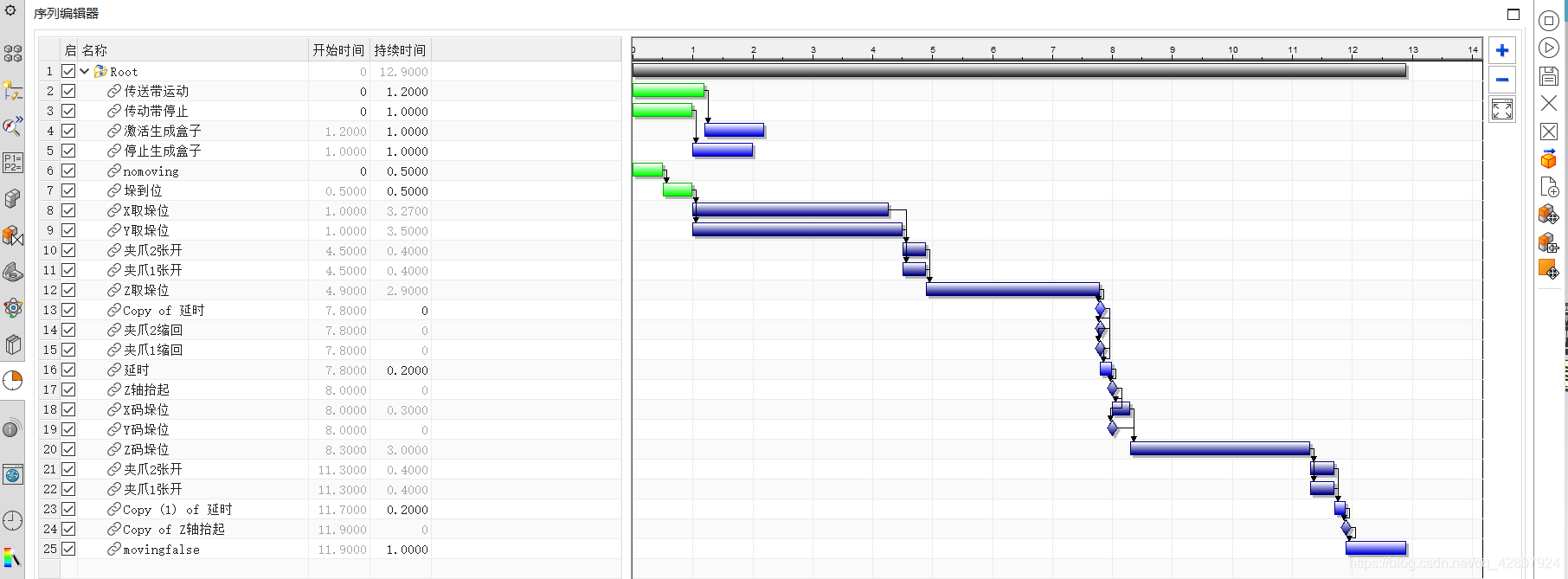
把盒子碰撞体勾上碰撞时粘连就不会滑动,或者在文件-首选项-机电概念中更改摩擦系数。
最终效果:
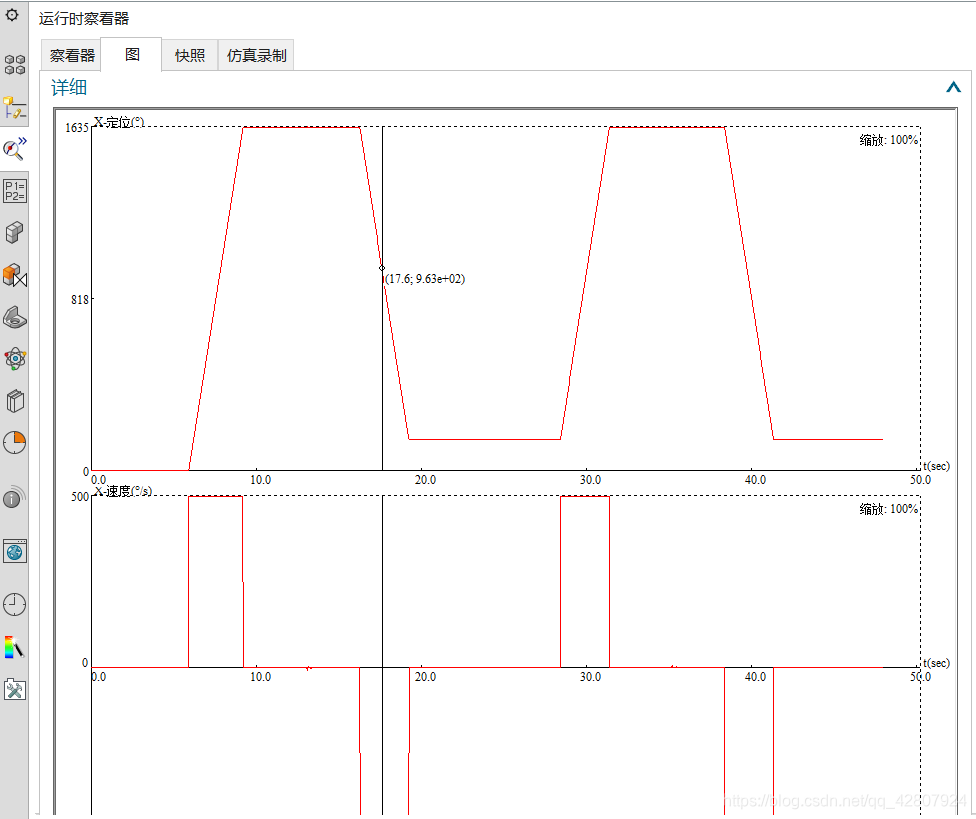
做分析中,曲线十分重要,通过添加变量到查看器,勾选,运行在图中就可以自动生成图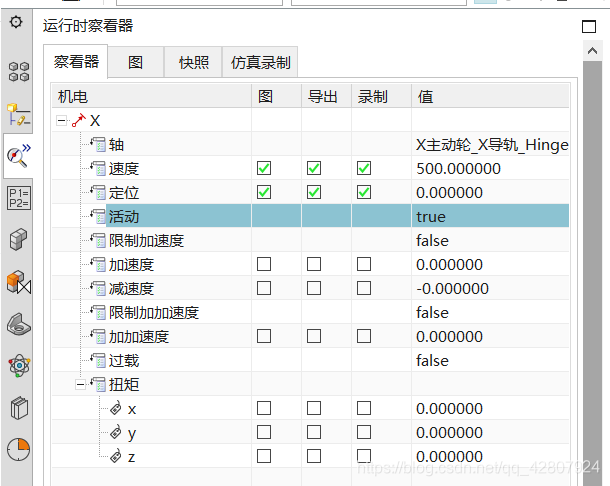
【UG NX MCD 机电一体化概念设计】UG NX MCD+PLCSIM Advanced联合仿真实例(三) 联合调试
B站演示视频 :https://www.bilibili.com/video/BV1f54y1Q7vG/
链接:https://pan.baidu.com/s/18c-gMuPywBZ__0pvB3A0hQ
提取码:s86q
文章列表:
【UG NX MCD 机电一体化概念设计】UG NX MCD+PLCSIM Advanced联合仿真实例(一)基本配置
【UG NX MCD 机电一体化概念设计】UG NX MCD+PLCSIM Advanced联合仿真实例(二 )仿真序列
【UG NX MCD 机电概念一体化设计】UG NX MCD+PLCSIM Advanced联合仿真实例(三) 联合调试
B站视频列表:
仿真序列演示视频:https://www.bilibili.com/video/BV1f54y1Q7vG
联合仿真演示视频:https://www.bilibili.com/video/BV1Kk4y167LR
仿真序列模型分享:
链接:https://pan.baidu.com/s/18c-gMuPywBZ__0pvB3A0hQ
提取码:s86q
但是这里我们选择后者来做,各自为滑动副添加气缸和气动阀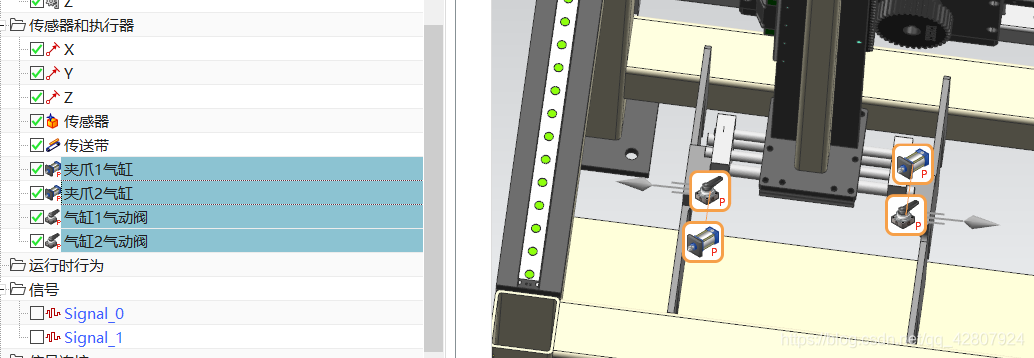
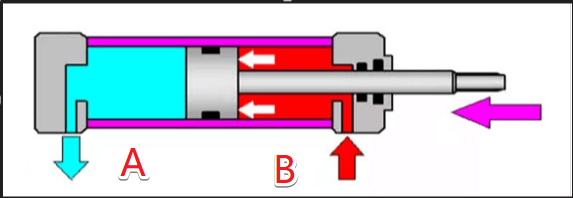
气缸配置界面 可以设置AB室初始压力,可以设置气缸结构参数和气体介质参数等,这里主要按需设置行程就行,初始压力都为0。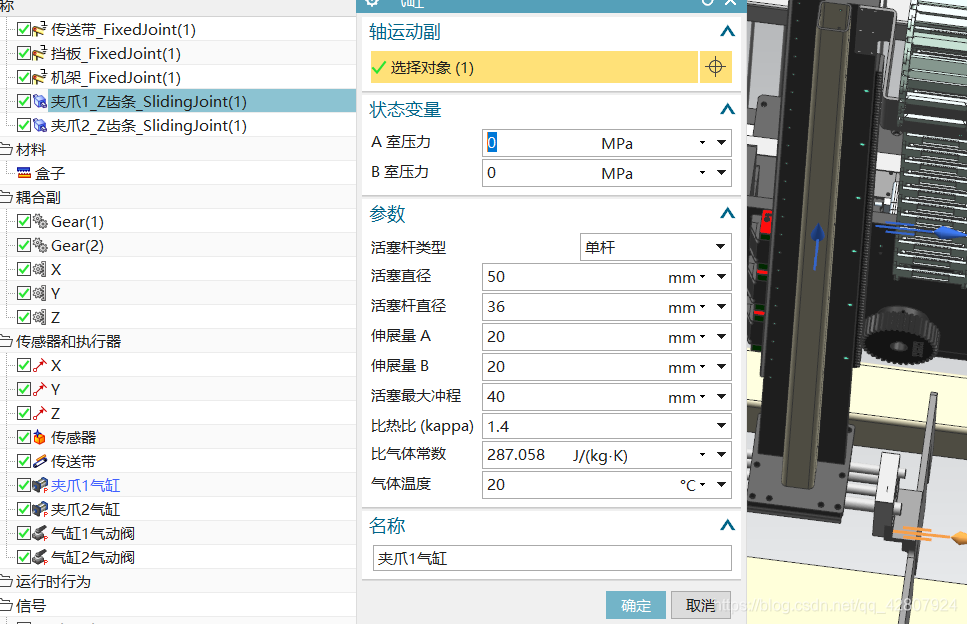
A室和B室如下,杆的指向和滑动副矢量方向一致
气动阀配置界面,可以选择三通和四通,这里选择四通
公称压力和公称流量存疑 (存疑)
公称流量通常是指流量控制阀在额定工作状态下通过的名义流量
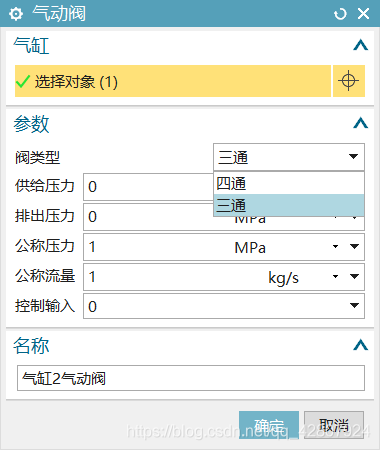
气动阀其实是电磁阀和气源处理元件的组合,其中气源压力最高常使用1.0MPa

控制输入的值范围取值:三通和四通取值区别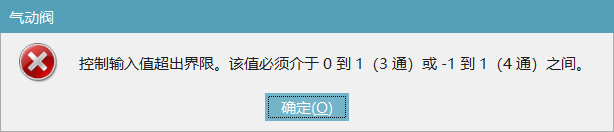
两位三通电磁阀如下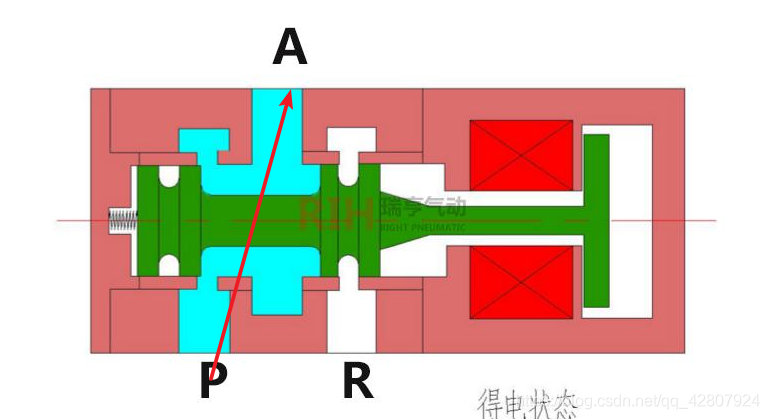
两位四通阀如下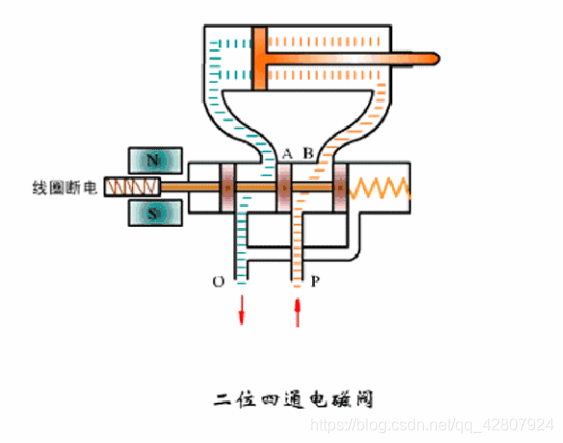
从下图中可知,在MCD中,供给压力是P管路压力,控制输入通过正负和数值控制流向和流向快慢,排出压力为0即可
但其实按常理给定气压值,非常容易出现这种情况,通过提高供给压力是可以解决的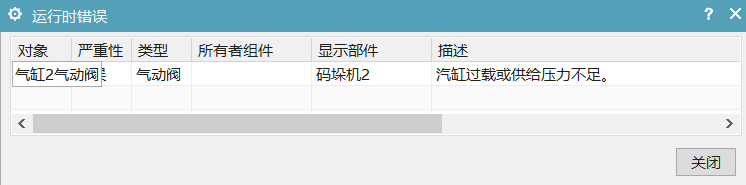
继续添加仿真序列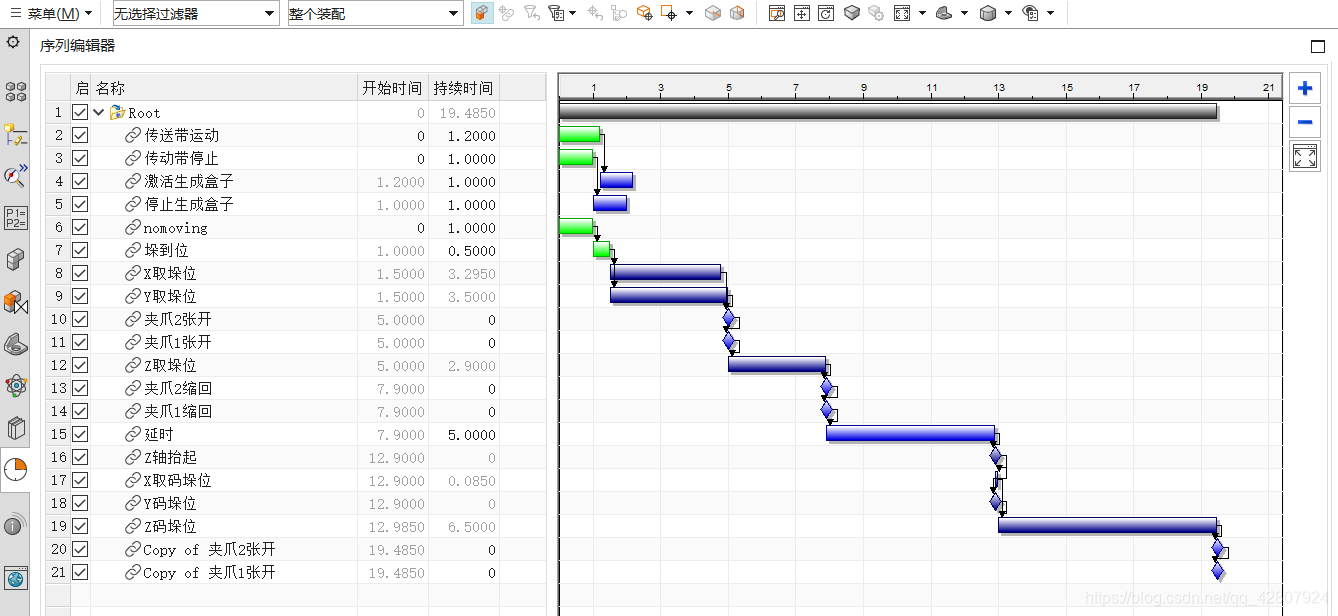
效果
对于具体怎么设置和为什么出错暂时未摸索出来,很容易出错,所以暂时放弃这种方式,直接用位置控制。欢迎提供教程。
[1] 气缸工作原理_气缸原理 http ://www.cnrih.com/wz/50.html
[2] 电磁阀符号_电磁阀工作原理http://www.cnrih.com/wz/563.html
[3]气动元件一般使用多大气压值http://www.cnrih.com/wt/580.html
[4] 亚德客气源元件产品https://www.airtac.com/pro_det.aspx?c_kind=4&c_kind2=19&c_kind3=39&c_kind4=474&c_kind5=&id=346
[5]MCD 机电一体化概念设计首选项https://www.cnblogs.com/cosimulation/p/10527436.html
汽缸过载或供给压力不足,解决办法:提高供给压力
B室死体积降为负值,解决办法:降低供给压力
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















