















































软件

产品


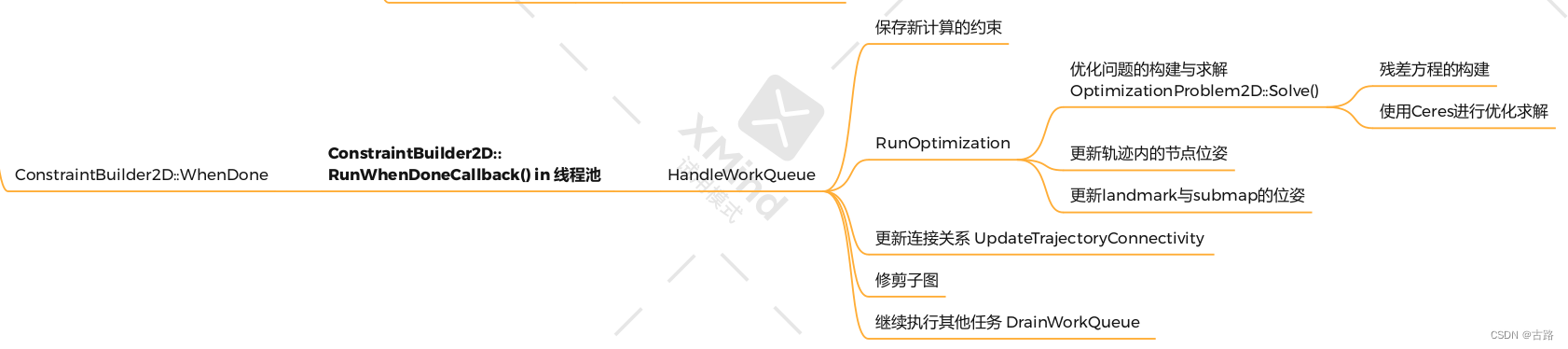
主要业务逻辑回到mapping/internal/2d/pose_graph_2d.cc/PoseGraph2https://www.gofarlic.com:HandleWorkQueue-->RunOptimization()中。具体的优化这一部分就是在optimization中进行实现。
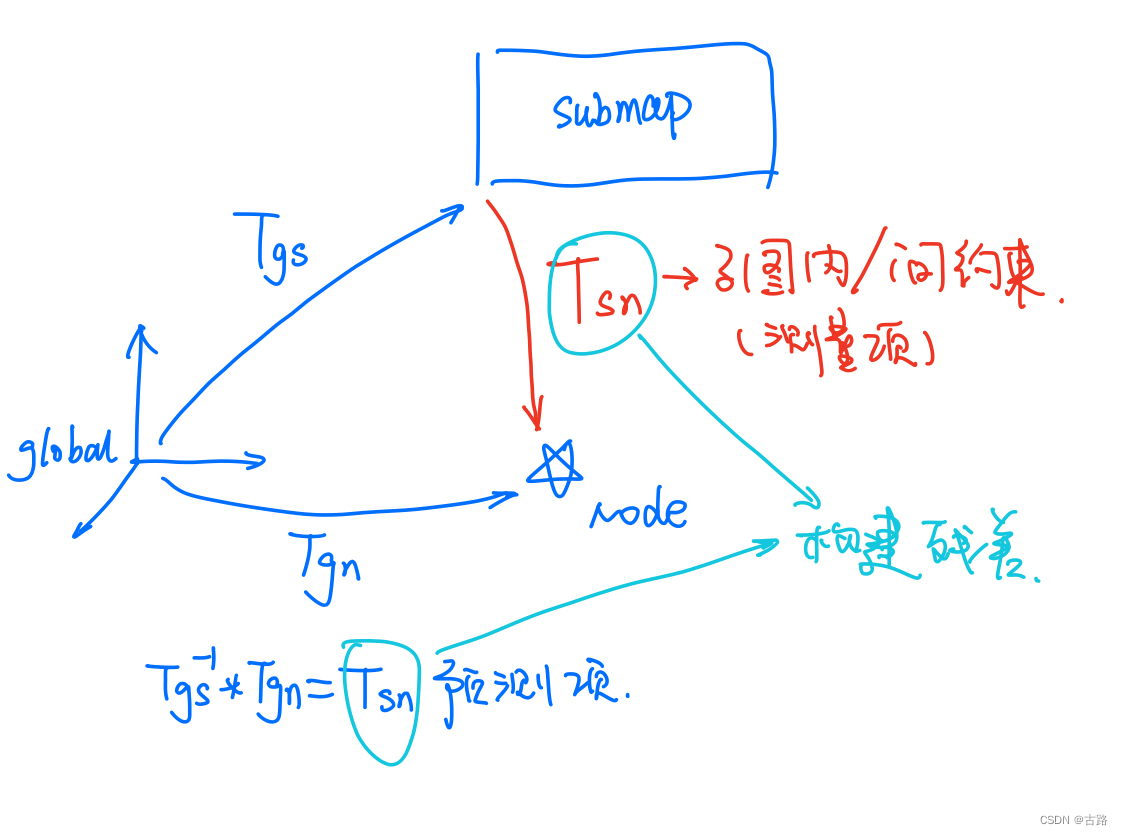
前面计算约束结果为:
将节点与子图原点在global坐标系下的相对位姿 与 约束 的差值作为残差项
残差计算代码:
/**
* @brief 2d 根据SPA论文里的公式求残差
*
* 计算残差:
* T12 = T1.inverse() * T2
* [R1.inverse * R2, R1.inverse * (t2 -t1)]
* [0 , 1 ]
*
* @param[in] relative_pose
* @param[in] start
* @param[in] end
* @return std::array<T, 3>
*/
template <typename T>
static std::array<T, 3> ComputeUnscaledError(
const transform::Rigid2d& relative_pose, const T* const start,
const T* const end) {
// 旋转矩阵R
const T cos_theta_i = cos(start[2]);
const T sin_theta_i = sin(start[2]);
const T delta_x = end[0] - start[0]; // t2 -t1
const T delta_y = end[1] - start[1];
const T h[3] = {cos_theta_i * delta_x + sin_theta_i * delta_y, // R.inverse * (t2 -t1)
-sin_theta_i * delta_x + cos_theta_i * delta_y,
end[2] - start[2]};
return {{T(relative_pose.translation().x()) - h[0],
T(relative_pose.translation().y()) - h[1],
common::NormalizeAngleDifference(
T(relative_pose.rotation().angle()) - h[2])}};
}
landmark数据 与 通过2个节点位姿插值出来的相对位姿 的差值作为残差项
struct LandmarkNode {
// landmark数据是相对于tracking_frame的相对坐标变换
struct LandmarkObservation {
int trajectory_id;
common::Time time;
transform::Rigid3d landmark_to_tracking_transform;
double translation_weight;
double rotation_weight;
};
// 同一时刻可能会观测到多个landmark数据
std::vector<LandmarkObservation> landmark_observations;
// 这帧数据对应的tracking_frame在global坐标系下的位姿
absl::optional<transform::Rigid3d> global_landmark_pose;
bool frozen = false;
};
主要是node <--> landmark 之间的约束:
// Step: landmark数据 与 通过2个节点位姿插值出来的相对位姿 的差值作为残差项
AddLandmarkCostFunctions(landmark_nodes, node_data_, &C_nodes, &C_landmarks,
&problem, options_.huber_scale());
略.
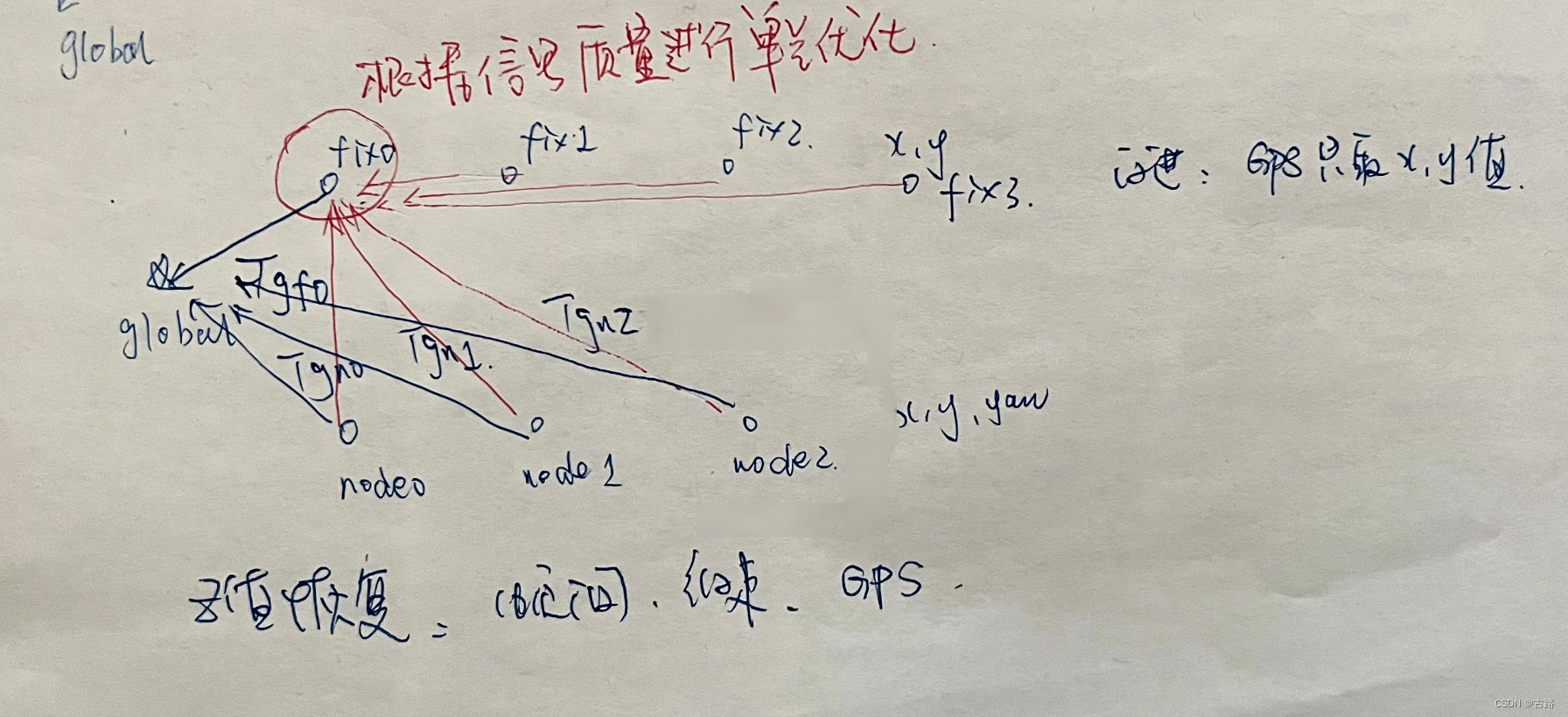
节点与节点间在global坐标系下的相对坐标变换 与 通过里程计数据插值出的相对坐标变换 的差值作为残差项
节点与节点间在global坐标系下的相对坐标变换 与 相邻2个节点在local坐标系下的相对坐标变换 的差值作为残差项
节点与gps坐标系原点在global坐标系下的相对坐标变换 与 通过gps数据进行插值得到的相对坐标变换 的差值作为残差项
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















