















































软件

产品


在上节讲到利用在末端执行器施加Marke点驱动以及施加空间螺旋曲线进行轨迹规划仿真,本节讲述如何得到各关节的运动输入曲线,利用Spline工具对曲线采集数据样点,作为各关节驱动的的输入参数。
1、得到各关节的转动关节角曲线,作为各关节驱动的输入;
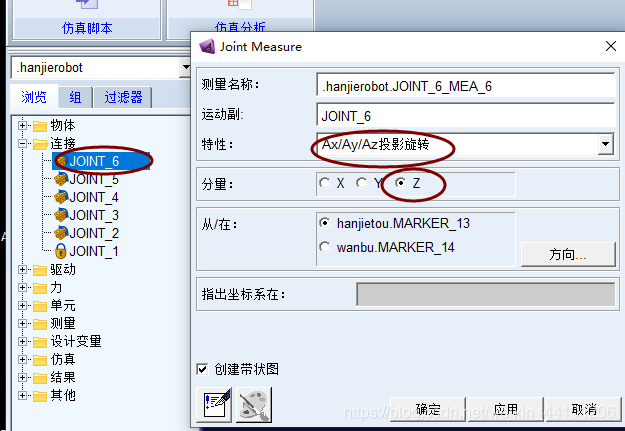
(1)选中一个旋转副,鼠标右键选择测量(measure);
(2)修改“测量名称”,以便在后处理中选择,特性选择“Ax/Ay/Az投影旋转”,分量选择“Z”方向,点击“确定”。
(3)同理测量其余旋转副的转动关节角;
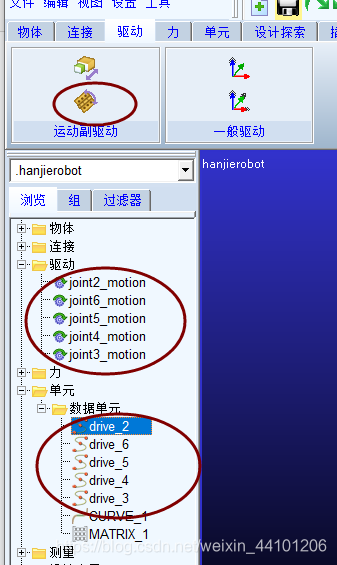
2、删除添加在单元里的点驱动。
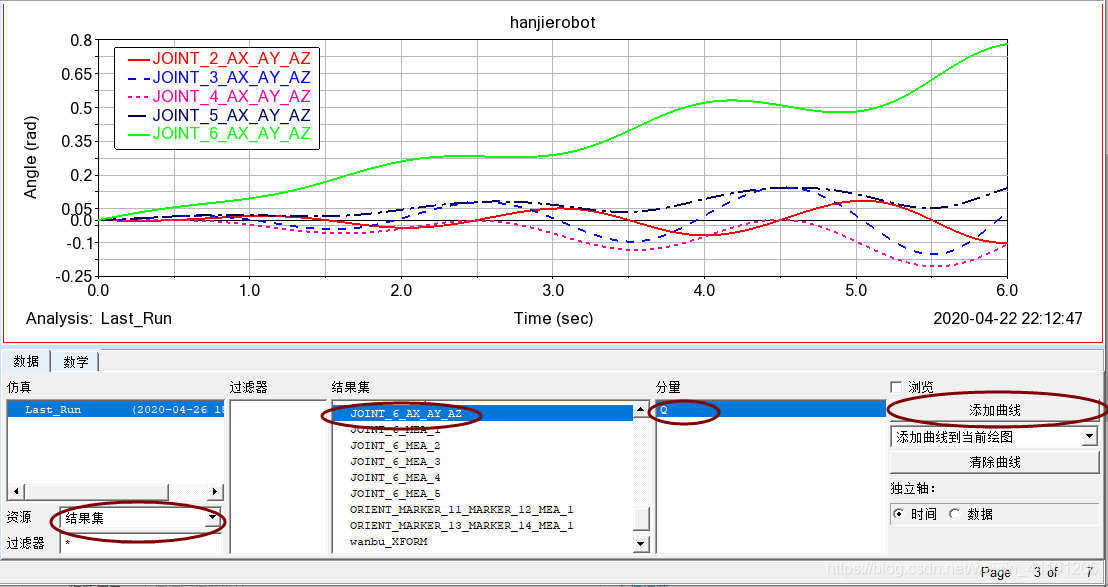
3、打开后处理界面
(1)将刚刚测量的各关节旋转角曲线添加在同一坐标系中;
(2)点击工具栏中的  图标,在下方会弹出数学运算工具箱,点击“Spline”,输入“样条函数名称”,鼠标点击选择图像框中的相应曲线,即可在模型窗口单元中生成相应的样条数据。
图标,在下方会弹出数学运算工具箱,点击“Spline”,输入“样条函数名称”,鼠标点击选择图像框中的相应曲线,即可在模型窗口单元中生成相应的样条数据。
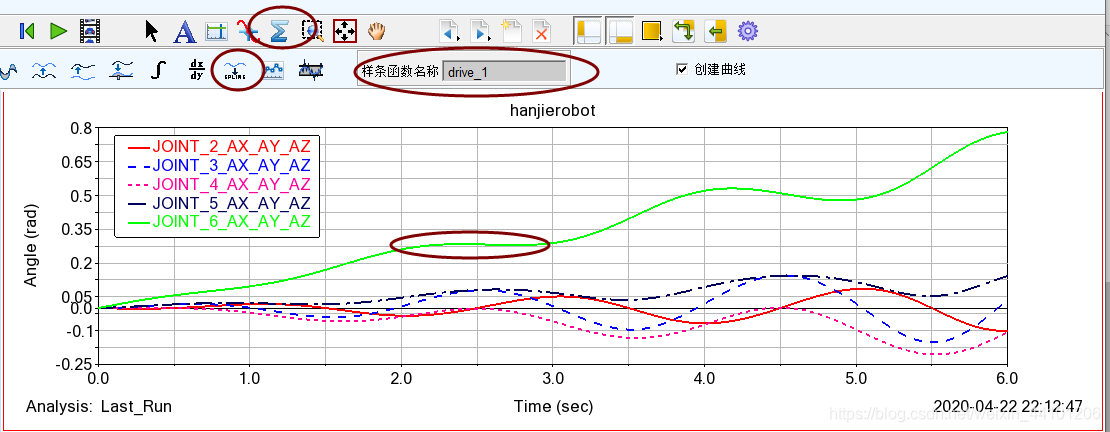

(3)同理生成所有五个关节的样条曲线数据点。
4、在每个关节处施加旋转驱动
5、点击在相应关节施加的“旋转驱动”,鼠标右键,点击“修改”,打开“函数(时间)”,在文本框中输入“AKISPL(time, 0, drive_6, 0)”,其中drive_6为刚刚生成的相应关节的样条曲线数据的名称。
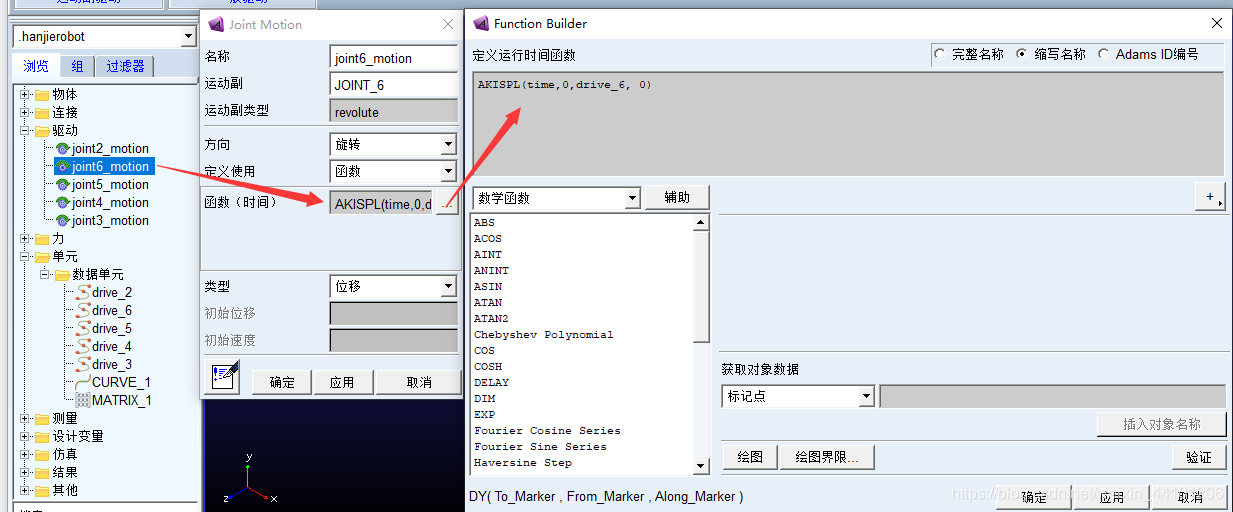
6、同理,完成其他关节旋转驱动的函数的添加,其中“-AKISPL(time, 0, drive_6, 0)”,表示与施加驱动的方向相反。
7、完成驱动施加后,点击仿真,即可观察运动轨迹是否和施加点驱动的轨迹相同。
点击观察某点轨迹,可选择末端轨迹的marker点,观察该点轨迹。从而判断是否符合实际要求。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















