from ctypes import *
STATUS_OK = 1
RESERVED = 0 # 保留字段
"""1.读取动态链接库"""
# 依赖的DLL文件(存放在根目录下)
CAN_DLL_PATH = './ControlCAN.dll'
# 读取DLL文件
Can_DLL = windll.LoadLibrary(CAN_DLL_PATH)
"""2.VCI_OpenDevice 打开设备"""
# 打开设备, 一个设备只能打开一次
# return: 1=OK 0=ERROR
def connect(VCI_USB_CAN_2, DEV_INDEX):
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# RESERVED: 保留参数
ret = Can_DLL.VCI_OpenDevice(VCI_USB_CAN_2, DEV_INDEX, RESERVED)
if ret == STATUS_OK:
print('VCI_OpenDevice: 设备开启成功')
else:
print('VCI_OpenDevice: 设备开启失败')
return ret
"""3.VCI_InitCAN 初始化指定CAN通道"""
# 通道初始化参数结构
# AccCode: 过滤验收码
# AccMask: 过滤屏蔽码
# Reserved: 保留字段
# Filter: 滤波模式 0/1=接收所有类型 2=只接收标准帧 3=只接收扩展帧
# Timing0: 波特率 T0
# Timing1: 波特率 T1
# Mode: 工作模式 0=正常工作 1=仅监听模式 2=自发自收测试模式
class VCI_CAN_INIT_CONFIG(Structure):
_fields_ = [
("AccCode", c_uint),
("AccMask", c_uint),
("Reserved", c_uint),
("Filter", c_ubyte),
("Timing0", c_ubyte),
("Timing1", c_ubyte),
("Mode", c_ubyte)
]
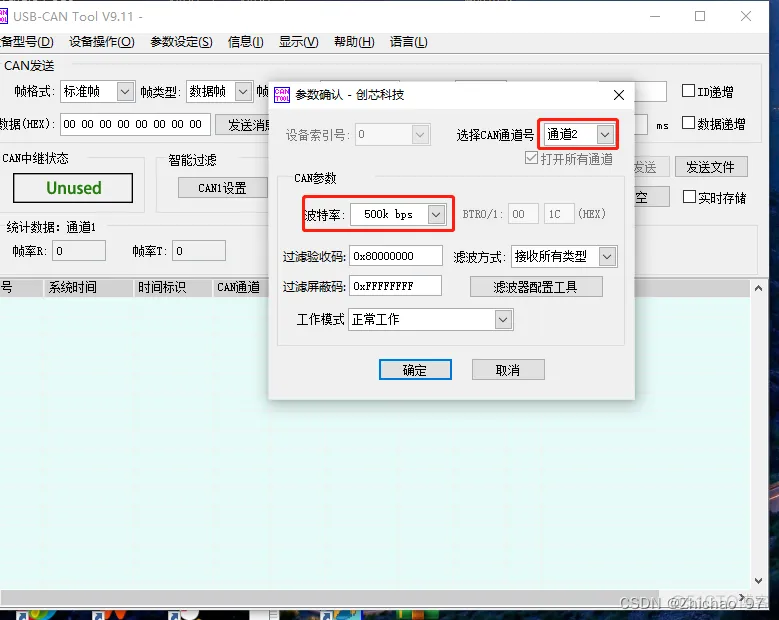
# 过滤验收码
ACC_CODE = 0x80000000
# 过滤屏蔽码
ACC_MASK = 0xFFFFFFFF
# 滤波模式 0/1=接收所有类型
FILTER = 0
# 波特率 T0
TIMING_0 = 0x03
# 波特率 T1
TIMING_1 = 0x1C
# 工作模式 0=正常工作
MODE = 0
# 初始化通道
# return: 1=OK 0=ERROR
def init(VCI_USB_CAN_2, DEV_INDEX, can_index):
init_config = VCI_CAN_INIT_CONFIG(ACC_CODE, ACC_MASK, RESERVED, FILTER, TIMING_0, TIMING_1, MODE)
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
# init_config: 请求参数体
ret = Can_DLL.VCI_InitCAN(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(init_config))
if ret == STATUS_OK:
print('VCI_InitCAN: 通道 ' + str(can_index + 1) + ' 初始化成功')
else:
print('VCI_InitCAN: 通道 ' + str(can_index + 1) + ' 初始化失败')
return ret
"""4.VCI_StartCAN 打开指定CAN通道"""
# 打开通道
# return: 1=OK 0=ERROR
def start(VCI_USB_CAN_2, DEV_INDEX, can_index):
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
ret = Can_DLL.VCI_StartCAN(VCI_USB_CAN_2, DEV_INDEX, can_index)
if ret == STATUS_OK:
print('VCI_StartCAN: 通道 ' + str(can_index + 1) + ' 打开成功')
else:
print('VCI_StartCAN: 通道 ' + str(can_index + 1) + ' 打开失败')
return ret
"""5.VCI_Transmit 发送数据"""
# CAN帧结构体
# ID: 帧ID, 32位变量, 数据格式为靠右对齐
# TimeStamp: 设备接收到某一帧的时间标识, 时间标示从CAN卡上电开始计时, 计时单位为0.1ms
# TimeFlag: 是否使用时间标识, 为1时TimeStamp有效, TimeFlag和TimeStamp只在此帧为接收帧时才有意义
# SendType: 发送帧类型 0=正常发送(发送失败会自动重发, 重发时间为4秒, 4秒内没有发出则取消) 1=单次发送(只发送一次, 发送失败不会自动重发, 总线只产生一帧数据)[二次开发, 建议1, 提高发送的响应速度]
# RemoteFlag: 是否是远程帧 0=数据帧 1=远程帧(数据段空)
# ExternFlag: 是否是扩展帧 0=标准帧(11位ID) 1=扩展帧(29位ID)
# DataLen: 数据长度DLC(<=8), 即CAN帧Data有几个字节, 约束了后面Data[8]中的有效字节
# Data: CAN帧的数据, 由于CAN规定了最大是8个字节, 所以这里预留了8个字节的空间, 受DataLen约束, 如DataLen定义为3, 即Data[0]、Data[1]、Data[2]是有效的
# Reserved: 保留字段
class VCI_CAN_OBJ(Structure):
_fields_ = [
("ID", c_uint),
("TimeStamp", c_uint),
("TimeFlag", c_ubyte),
("SendType", c_ubyte),
("RemoteFlag", c_ubyte),
("ExternFlag", c_ubyte),
("DataLen", c_ubyte),
("Data", c_ubyte * 8),
("Reserved", c_ubyte * 3)
]
# 发送帧ID
TRANSMIT_ID = 0x1
# 接收帧ID
RECEIVE_ID = 0x0
# 时间标识
TIME_STAMP = 0
# 是否使用时间标识
TIME_FLAG = 0
# 发送帧类型
TRANSMIT_SEND_TYPE = 1
# 接收帧类型
RECEIVE_SEND_TYPE = 0
# 是否是远程帧
REMOTE_FLAG = 0
# 是否是扩展帧
EXTERN_FLAG = 0
# 数据长度DLC
DATA_LEN = 8
# 用来接收的帧结构体数组的长度, 适配器中为每个通道设置了2000帧左右的接收缓存区
RECEIVE_LEN = 2500
# 接收保留字段
WAIT_TIME = 0
# 要发送的帧结构体数组的长度(发送的帧数量), 最大为1000, 建议设为1, 每次发送单帧, 以提高发送效率
TRANSMIT_LEN = 1
# 发送数据
# return: 1=OK 0=ERROR
def transmit(VCI_USB_CAN_2, DEV_INDEX, can_index, TRANSMIT_DATA01, TRANSMIT_DATA02, TRANSMIT_DATA03, TRANSMIT_DATA04, TRANSMIT_DATA05, TRANSMIT_DATA06, TRANSMIT_DATA07, TRANSMIT_DATA08): # TRANSMIT_DATA01~TRANSMIT_DATA08为要发送的8个字节的数据
ubyte_array_8 = c_ubyte * 8
DATA = ubyte_array_8(TRANSMIT_DATA01, TRANSMIT_DATA02, TRANSMIT_DATA03, TRANSMIT_DATA04, TRANSMIT_DATA05, TRANSMIT_DATA06, TRANSMIT_DATA07, TRANSMIT_DATA08)
ubyte_array_3 = c_ubyte * 3
RESERVED_3 = ubyte_array_3(RESERVED, RESERVED, RESERVED)
can_obj = VCI_CAN_OBJ(TRANSMIT_ID, TIME_STAMP, TIME_FLAG, TRANSMIT_SEND_TYPE, REMOTE_FLAG, EXTERN_FLAG, DATA_LEN, DATA, RESERVED_3)
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
# can_obj: 请求参数体
# TRANSMIT_LEN: 发送的帧数量
ret = Can_DLL.VCI_Transmit(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(can_obj), TRANSMIT_LEN)
if ret == STATUS_OK:
print('VCI_Transmit: 通道 ' + str(can_index + 1) + ' 发送数据成功')
else:
print('VCI_Transmit: 通道 ' + str(can_index + 1) + ' 发送数据成功')
"""6.VCI_Receive 接收数据"""
# 接收数据
# return: 1=OK 0=ERROR
def receive(VCI_USB_CAN_2, DEV_INDEX, can_index):
ubyte_array_8 = c_ubyte * 8
DATA = ubyte_array_8(RESERVED, RESERVED, RESERVED, RESERVED, RESERVED, RESERVED, RESERVED, RESERVED)
ubyte_array_3 = c_ubyte * 3
RESERVED_3 = ubyte_array_3(RESERVED, RESERVED, RESERVED)
# 参数结构参考122行
can_obj = VCI_CAN_OBJ(RECEIVE_ID, TIME_STAMP, TIME_FLAG, RECEIVE_SEND_TYPE, REMOTE_FLAG, EXTERN_FLAG, DATA_LEN, DATA, RESERVED_3)
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
# can_obj: 请求参数体
# RECEIVE_LEN: 用来接收帧结构体数组的长度
# WAIT_TIME: 保留参数
ret = Can_DLL.VCI_Receive(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(can_obj), RECEIVE_LEN, WAIT_TIME)
while ret != STATUS_OK:
print('VCI_Receive: 通道 ' + str(can_index + 1) + ' 接收数据失败, 正在重试')
ret = Can_DLL.VCI_Receive(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(can_obj), RECEIVE_LEN, WAIT_TIME)
else:
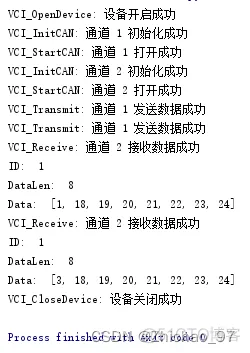
print('VCI_Receive: 通道 ' + str(can_index + 1) + ' 接收数据成功')
print('ID: ', can_obj.ID)
print('DataLen: ', can_obj.DataLen)
print('Data: ', list(can_obj.Data))
return ret
"""7.关闭已打开的USB-CAN适配器"""
def close(VCI_USB_CAN_2, DEV_INDEX):
Can_DLL.VCI_CloseDevice(VCI_USB_CAN_2, DEV_INDEX)
print("VCI_CloseDevice: 设备关闭成功")
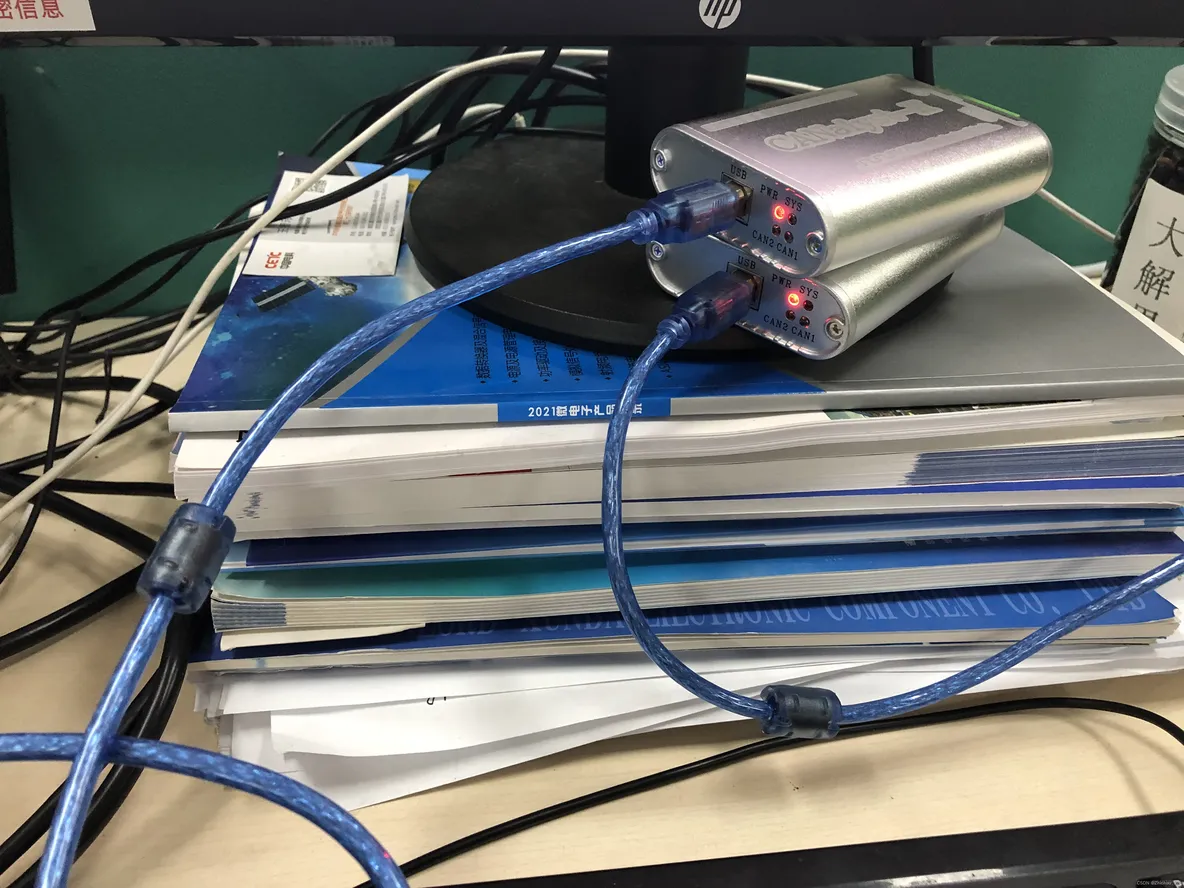
if __name__ == '__main__':
# CAN卡类别为 USBCAN-2A, USBCAN-2C, CANalyst-II
VCI_USB_CAN_2 = 4
# CAN卡下标索引, 比如当只有一个USB-CAN适配器时, 索引号为0, 这时再插入一个USB-CAN适配器那么后面插入的这个设备索引号就是1, 以此类推
DEV_INDEX = 0
CAN_INDEX_1 = 0
CAN_INDEX_2 = 1
connect(VCI_USB_CAN_2, DEV_INDEX)
# 初始化CAN1
init(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1)
# 启动CAN1
start(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1)
# 初始化CAN2
init(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
# 启动CAN2
start(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
# CAN1发送数据
transmit(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1, 0x01, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18)
transmit(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1, 0x03, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18)
# CAN2接收数据
receive(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
receive(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
# 关闭设备
close(VCI_USB_CAN_2, DEV_INDEX)
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
- 154.
- 155.
- 156.
- 157.
- 158.
- 159.
- 160.
- 161.
- 162.
- 163.
- 164.
- 165.
- 166.
- 167.
- 168.
- 169.
- 170.
- 171.
- 172.
- 173.
- 174.
- 175.
- 176.
- 177.
- 178.
- 179.
- 180.
- 181.
- 182.
- 183.
- 184.
- 185.
- 186.
- 187.
- 188.
- 189.
- 190.
- 191.
- 192.
- 193.
- 194.
- 195.
- 196.
- 197.
- 198.
- 199.
- 200.
- 201.
- 202.
- 203.
- 204.
- 205.
- 206.
- 207.
- 208.
- 209.
- 210.
- 211.
- 212.
- 213.
- 214.
- 215.
- 216.
- 217.
- 218.
- 219.
- 220.
- 221.
- 222.
- 223.
- 224.
- 225.
- 226.
- 227.
- 228.
- 229.
- 230.
- 231.
- 232.
- 233.
- 234.





























































 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















