















































软件

产品


给岁月以文明, 而不是给文明以岁月。
这篇文章主要是用了LSTM网络,主要是变换视频帧到一个固定的位置,然后将整个landmarks转变为平均脸来删除身份信息。同时它输入的是log-mel 频谱 的一阶和二阶时间差作为输入来预测landmarks, 计算的误差使用MSE loss和
作者使用了GRID数据库进行训练, 使用720*576的 分辨率 视频, 25帧每秒提取帧, 音频采样率为44.1kHz
使用40ms的汉宁窗计算 音频 64位的log-mel频谱, 没有加overlap来匹配视频帧。然后计算 log-mel 谱的一阶和二阶时间差异,并将它们用作我们网络的输入(128 维特征序列,两个64自然是128)。
人脸landmarks对齐(Face Landmark Alignment)
对齐后不同说话人的人脸大小和大致位置相似, 但是他们的形状和嘴部的位置仍然不同, 所以希望在训练网络之前从landmarks中删除身份信息。
具体是这样的:
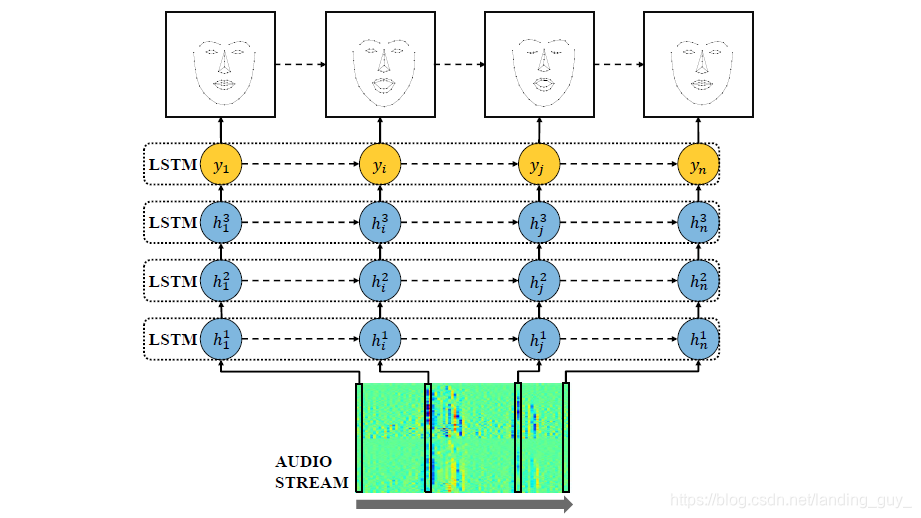
这个有四层LSTM, 对于输入提供了当前帧和前N帧对数谱的一阶和二阶时间差。输出是预测的当前帧(如果没有添加延迟)或前一帧(如果添加延迟)的面部标志的 x 和 y 坐标。我们引入的延迟量介于 1(40 毫秒)和 5 帧之间(200 毫秒), 因为1s分为了25帧。误差是MSE函数。

有部分代码用到的知识放在了附录中。
import cv2
import matplotlib.pyplot as plt
import numpy as np
import dlib
image = cv2.imread('../0001.jpeg')
# 这里的路径是带人脸的图片
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat')
# gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
faces = detector(image) # 也可以使用参数1或者2放大
pos = []
for face in faces:
cv2.rectangle(image, (face.left(), face.top()), (face.right(), face.bottom()), (122, 122, 123), 3)
shape = predictor(image, face) # 得到68个关键点坐标
print(shape.parts())
for pt in shape.parts():
pt_position = (pt.x, pt.y)
pos.append(pt_position)
pos = pos[48:66]
for position in pos:
print(position)
cv2.circle(image, position, 3, (123, 123, 0), -1)
plt.imshow(image[:,:,::-1])
plt.axis('off')
plt.show()

背后的想法也很naive, 就是通过混合两个图像来创建中间的图像,就像下面的公式:

当 α \alpha α 为0时是另一张图, 1的时候是另一张图的样子,对应的操作是像素级。当然这样做效果会不好,如上图。
出现这种问题的原因也很好理解,就是对应像素并不匹配,假如对于图像中的每个像素我们都能神奇的找到对应关系,然后就可以对每个像素用下面的公式:
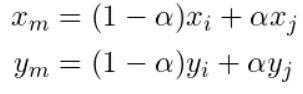
x i x_i xi 对应图 I I I 的像素点坐标, x j x_j xj 对应图 J J J 的像素点坐标, x m x_m xm 对应要 morph的图的像素位置, 举个例子就是假如说都是眼睛, 在两张图上的位置不同, 可以通过调整参数确定眼睛的新位置.
然后我们确定 morph 的图片每个像素的强度, 也就是颜色吧.

在这里我按作者的意思描述, 源网址在这。
作者首先 dlib 检测了68个点, 然后在人的右手边耳朵上加了1个点, 脖子上加了1个点, 左右肩膀上加了2个点, 图片四周定位加了8个点, 这总共是80个点了(当然越多点越好)。 如下图: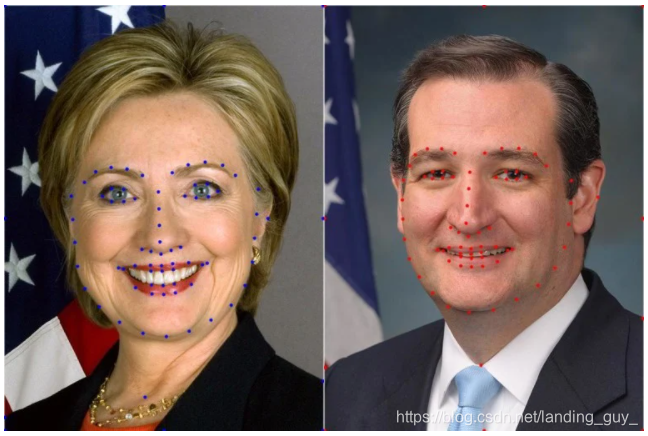
Delaunay Triangulation
中文 是德劳内三角化,是三角剖分的一种算法。那么什么是德劳内三角化呢?
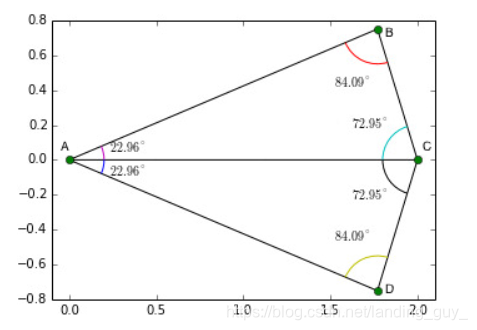
在Delaunay三角剖分中,选择的三角形没有点在任何三角形的外接圆内。就像下图, C需要在 Δ A B D \Delta ABD ΔABD 的外接圆外。
Delaunay三角剖分的一个有趣的特性是它不喜欢“瘦”三角形(即具有一个大角度的三角形)。
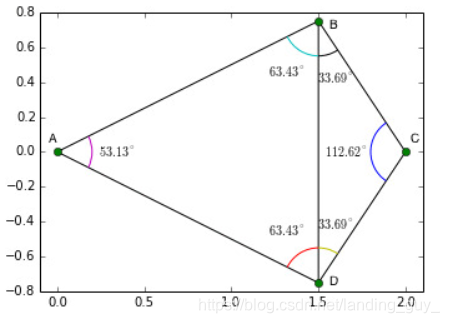
可以看到上图中的B和D点移动了位置, 然后为了切分 ∠ B C D ∠BCD ∠BCD, 防止它太大, 所以切分的三角形变化了。
最明显的(但不是最有效的)方法是从任何三角形开始,检查任何三角形的外接圆是否包含另一个点。如果有,翻转并继续,直到没有一个三角形外接圆包含点。说到德劳内三角剖分, 就需要先了解Voronoi Diagram, 也就是维诺图。
Voronoi Diagram

有些像每两个点之间的垂直平分线, 假如你连接在维诺图中相邻的点,就会得到三角剖分。如下图:
这里的相邻是指的互相接壤。
放代码, 咬人!
#!/usr/bin/python
import cv2
import numpy as np
import random
# Check if a point is inside a rectangle
def rect_contains(rect, point) :
if point[0] < rect[0] :
return False
elif point[1] < rect[1] :
return False
elif point[0] > rect[2] :
return False
elif point[1] > rect[3] :
return False
return True
# Draw a point
def draw_point(img, p, color ) :
cv2.circle( img, p, 2, color, cv2.FILLED, cv2.LINE_AA, 0 )
# Draw delaunay triangles
def draw_delaunay(img, subdiv, delaunay_color ) :
triangleList = subdiv.getTriangleList()
size = img.shape
r = (0, 0, size[1], size[0])
for t in triangleList :
print(t)
pt1 = (int(t[0]), int(t[1]))
pt2 = (int(t[2]), int(t[3]))
pt3 = (int(t[4]), int(t[5]))
if rect_contains(r, pt1) and rect_contains(r, pt2) and rect_contains(r, pt3) :
cv2.line(img, pt1, pt2, delaunay_color, 1, cv2.LINE_AA, 0)
cv2.line(img, pt2, pt3, delaunay_color, 1, cv2.LINE_AA, 0)
cv2.line(img, pt3, pt1, delaunay_color, 1, cv2.LINE_AA, 0)
# Draw voronoi diagram
def draw_voronoi(img, subdiv) :
( facets, centers) = subdiv.getVoronoiFacetList([])
for i in range(0,len(facets)) :
ifacet_arr = []
for f in facets[i] :
ifacet_arr.append(f)
ifacet = np.array(ifacet_arr, np.int)
color = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255))
cv2.fillConvexPoly(img, ifacet, color, cv2.LINE_AA, 0);
ifacets = np.array([ifacet])
cv2.polylines(img, ifacets, True, (0, 0, 0), 1, cv2.LINE_AA, 0)
cv2.circle(img, (int(centers[i][0]), int(centers[i][1])), 3, (0, 0, 0), cv2.FILLED, cv2.LINE_AA, 0)
if __name__ == '__main__':
# Define window names
win_delaunay = "Delaunay Triangulation"
win_voronoi = "Voronoi Diagram"
# Turn on animation while drawing triangles
animate = True
# Define colors for drawing.
delaunay_color = (255,255,255)
points_color = (0, 0, 255)
# Read in the image.
img = cv2.imread("ted.jpg")
# Keep a copy around
img_orig = img.copy()
# Rectangle to be used with Subdiv2D
size = img.shape
print(size)
rect = (0, 0, size[1], size[0])
# Create an instance of Subdiv2D
subdiv = cv2.Subdiv2D(rect)
# Create an array of points.
points = []
# Read in the points from a text file
with open("ted_points.txt") as file :
for line in file :
x, y = line.split()
points.append((int(x), int(y)))
# Insert points into subdiv
for p in points :
subdiv.insert(p)
# Show animation
if animate :
img_copy = img_orig.copy()
# Draw delaunay triangles
draw_delaunay( img_copy, subdiv, (255, 255, 255) )
cv2.imshow(win_delaunay, img_copy)
cv2.waitKey(100)
# Draw delaunay triangles
draw_delaunay( img, subdiv, (255, 255, 255) )
# Draw points
for p in points :
draw_point(img, p, (0,0,255))
# Allocate space for Voronoi Diagram
img_voronoi = np.zeros(img.shape, dtype = img.dtype)
# Draw Voronoi diagram
draw_voronoi(img_voronoi,subdiv)
# Show results
cv2.imshow(win_delaunay,img)
cv2.imshow(win_voronoi,img_voronoi)
cv2.waitKey(0)
回到正题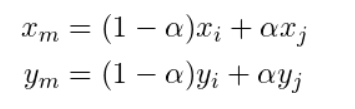
现在我们有图片1, 2 的80个点, 还有要morph图片的80个点
使用opencv的getAffineTransform函数, 计算第一张图到morph图的仿射变换, 同理计算图片2和morph图片的仿射变换。 80个点对应149个三角形
上一步我们获得了仿射变换矩阵, 现在我们可以把图片1中对应三角的所有像素变换为morph的图像的, 然后重复对所有的三角操作, 获得morph的图片, 同样的也对图片2进行操作。Opencv对应的函数是 warpAffine。 但是warpAffine 接收的是图像而不是三角形,所以trick 是对每个三角创建一个bounding box , 使用warpAffine扭曲在bounding box内的所有像素, 然后mask在bounding box外的所有像素。 这个三角形的mask是用fillConvexPoly 创造的。 确保使用warpAffine是使用blendMode BORDER_REFLECT_101, 这能够比较好的隐藏接缝。
#!/usr/bin/env python
import numpy as np
import cv2
import sys
# Read points from text file
def readPoints(path):
# Create an array of points.
points = []
# Read points
with open(path) as file:
for line in file:
x, y = line.split()
points.append((int(x), int(y)))
return points
# Apply affine transform calculated using srcTri and dstTri to src and
# output an image of size.
def applyAffineTransform(src, srcTri, dstTri, size):
# Given a pair of triangles, find the affine transform.
warpMat = cv2.getAffineTransform(np.float32(srcTri), np.float32(dstTri))
# Apply the Affine Transform just found to the src image
dst = cv2.warpAffine(src, warpMat, (size[0], size[1]), None, flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_REFLECT_101)
return dst
# Warps and alpha blends triangular regions from img1 and img2 to img
def morphTriangle(img1, img2, img, t1, t2, t, alpha):
# Find bounding rectangle for each triangle
r1 = cv2.boundingRect(np.float32([t1]))
r2 = cv2.boundingRect(np.float32([t2]))
r = cv2.boundingRect(np.float32([t]))
# Offset points by left top corner of the respective rectangles
t1Rect = []
t2Rect = []
tRect = []
for i in range(0, 3):
tRect.append(((t[i][0] - r[0]), (t[i][1] - r[1])))
t1Rect.append(((t1[i][0] - r1[0]), (t1[i][1] - r1[1])))
t2Rect.append(((t2[i][0] - r2[0]), (t2[i][1] - r2[1])))
# Get mask by filling triangle
mask = np.zeros((r[3], r[2], 3), dtype=np.float32)
cv2.fillConvexPoly(mask, np.int32(tRect), (1.0, 1.0, 1.0), 16, 0);
# Apply warpImage to small rectangular patches
img1Rect = img1[r1[1]:r1[1] + r1[3], r1[0]:r1[0] + r1[2]]
img2Rect = img2[r2[1]:r2[1] + r2[3], r2[0]:r2[0] + r2[2]]
size = (r[2], r[3])
warpImage1 = applyAffineTransform(img1Rect, t1Rect, tRect, size)
warpImage2 = applyAffineTransform(img2Rect, t2Rect, tRect, size)
# Alpha blend rectangular patches
imgRect = (1.0 - alpha) * warpImage1 + alpha * warpImage2
# Copy triangular region of the rectangular patch to the output image
img[r[1]:r[1] + r[3], r[0]:r[0] + r[2]] = img[r[1]:r[1] + r[3], r[0]:r[0] + r[2]] * (1 - mask) + imgRect * mask
if __name__ == '__main__':
filename1 = 'hillary.jpg'
filename2 = 'ted.jpg'
alpha = 0.5
# Read images
img1 = cv2.imread(filename1)
img2 = cv2.imread(filename2)
# Convert Mat to float data type
img1 = np.float32(img1)
img2 = np.float32(img2)
# Read array of corresponding points
points1 = readPoints('ted_points.txt')
points2 = readPoints('hillary.txt')
points = []
# Compute weighted average point coordinates
for i in range(0, len(points1)):
x = (1 - alpha) * points1[i][0] + alpha * points2[i][0]
y = (1 - alpha) * points1[i][1] + alpha * points2[i][1]
points.append((x, y))
# Allocate space for final output
imgMorph = np.zeros(img1.shape, dtype=img1.dtype)
# Read triangles from tri.txt
with open("tri.txt") as file:
for line in file:
x, y, z = line.split()
x = int(x)
y = int(y)
z = int(z)
t1 = [points1[x], points1[y], points1[z]]
t2 = [points2[x], points2[y], points2[z]]
t = [points[x], points[y], points[z]]
# Morph one triangle at a time.
morphTriangle(img1, img2, imgMorph, t1, t2, t, alpha)
# Display Result
cv2.imshow("Morphed Face", np.uint8(imgMorph))
cv2.waitKey(0)
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















