















































软件

产品


1.介绍
没什么好讲的,大部分情况是在吹自己有多厉害,只 翻译 了关于有限元的知识。
1.1有限元方法的快速回顾
任何有限元分析的第一步都是通过一个有限元的集合来描述一个实体几何的结构。每个有限元表示了物质结构的离散部分。有限单元由共享节点连接,节点和有限单元的集合称为网格(mesh)。每单位长度、面积或网格内的单元数称为网格密度。在应力分析中,节点位移(the displacements of the nodes)是Abaqus计算的基本变量。一旦节点位移已知,每个有限元中的应力和应变就可以很容易地确定。
1.1.1使用隐式的方法获得结点位移
我们从一个简单的桁架开始,如图1所示,一个桁架的一端受约束,一端受加载。
分析的目的是求出桁架自由端位移、桁架内部应力和桁架约束端反力。在这种情况下,如图1所示的杆将用两个桁架单元建模。在Abaqus桁架中,单元只能承受轴向载荷。图2显示了离散化的模型以及节点和单元标签。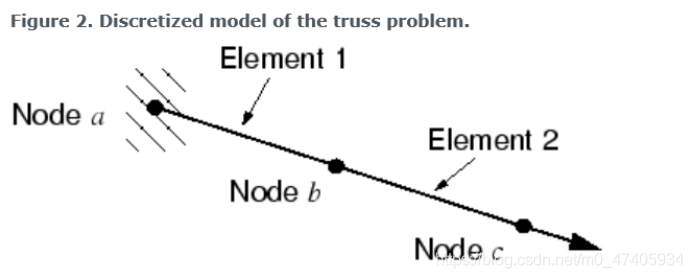
模型中每个节点的自由体图如图3所示。一般来说,每个节点将承受一个施加于模型的外荷载P和一个由附加在该节点上的单元的应力引起的内部荷载I。对于一个处于静态平衡的模型,作用在每个节点上的合力必须为零;也就是说,每个节点的内部和外部负载必须相互平衡。对于节点a,则平衡方程为: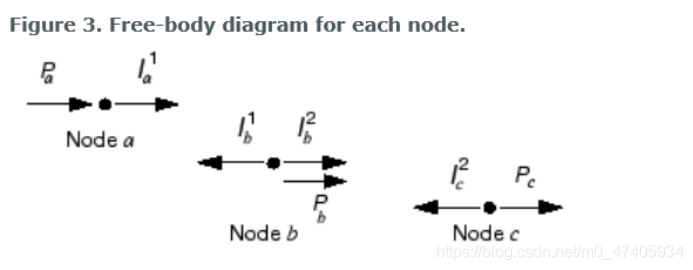
假设杆的长度变化很小,单元1中的应变为: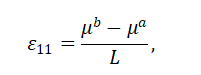
其中,分别为节点a,b的位移,L为单元的原始长度。
假设材料是线弹性的,杆中的应力由应变乘以杨氏模量E给出:
作用在端节点上的轴向力等于杆内的应力乘以杆的截面积a,由此得到内力、材料性能和位移之间的关系:
.
节点a保持平衡,可以得到:
.
节点b处的平衡必须考虑在该节点连接的两个单元所作用的内力。单元1的内力,现在作用方向相反,所以是负的。得到节点b的平衡方程:
.
节点c的平衡方程:
.
对于隐式方法,需要同时求解平衡方程才能得到所有节点的位移。将平衡方程写成矩阵的形式。如果两个单元的性质和维数相同,则平衡方程可简化为: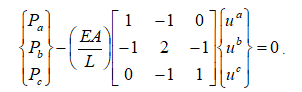
.
通常,每个单元的单元刚度项EA/L都不同,因此我们把这个模型中两个单元的单元刚度写成K1与 K2 。我们需要求得是外力P与内力I平衡的平衡方程的解。当考虑收敛性和非线性(convergence and nonlinearity)时,我们把它写成: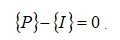
.
因此,对于完整的二元三节点结构,我们修改符号,将平衡方程改写为: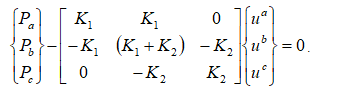
.
在隐式方法中,这个方程组可以求解得到三个未知变量的值ubu^bub,ucu^cuc,PaP_aPa,(uau^aua=0)。一旦位移已知,我们就可以回去用它们来计算桁架单元的应力。隐式有限元方法要求在每个解增量结束时求解方程组。
与隐式方法相比,显式方法,如在Abaqus/ explicit中使用的方法,不需要求解方程组或计算整体刚度矩阵。相反,解决方案是从一个增量到下一个增量的运动学。下一节将讨论将有限元法扩展到显式动力学的问题。
1.1.2 应力波传播
本节试图提供一些概念上的理解,当使用显式动力学方法时,力如何通过模型传播。在这个示例中,我们考虑应力波沿三单元杆的传播,如图1所示。我们将研究随着时间的增加对应的杆的状态。
在自由端有集中载荷P的初始结构: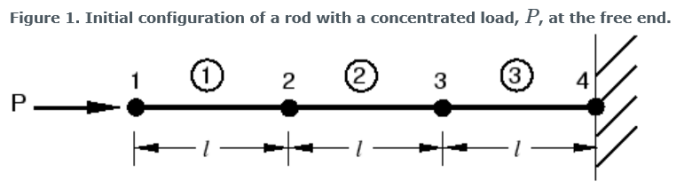
在第一个时间增量中,由于集中力P的作用,节点1有一个加速度u¨1\ddot{u}_1u¨1,该加速度导致节点1具有速度u˙1\dot{u}_1u˙1,而速度又会导致单元1中的应变速率ε¨el1\ddot{\varepsilon}_{el1}ε¨el1。单元1中应变的增量Δεel1\Delta \varepsilon_{el1}Δεel1是通过应变速率对第一个增量的时间积分得到的。总应变εel1\varepsilon_{el1}εel1是初始应变ε0\varepsilon_{0}ε0和应变增量之和,而在这种情况下初始应变ε0\varepsilon_{0}ε0为零。一旦计算出单元应变,单元应力σel1\sigma _{el1}σel1可以通过材料的本构模型计算得到。对于线弹性材料,应力就是 弹性模量 乘上总应变,这个过程如图2所示。节点2和节点3在第一个增量中不移动,因为没有外力作用于他们。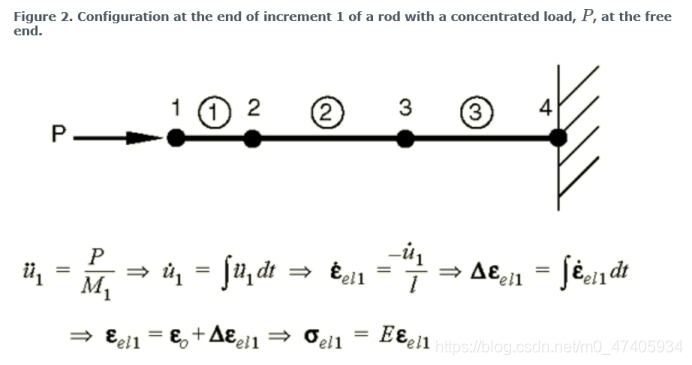
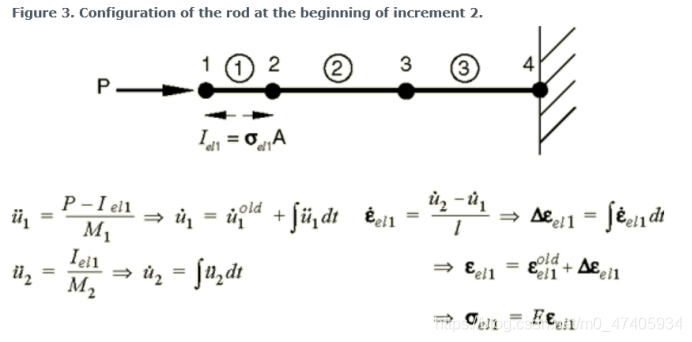
在第二次增量中,单元1中的应力对与单元1相关的节点施加内部的单元力,如图3所示。然后用这些单元应力计算节点1和节点2的动态平衡。
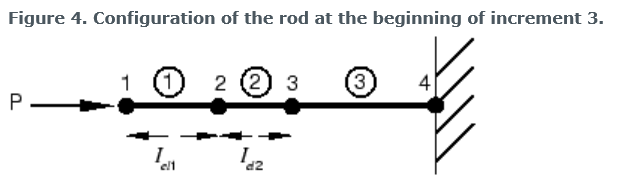
该过程继续进行,在第三个增量开始时,元素1和2都有应力,节点1、2和3都有力,如图4所示。该过程继续进行,直到分析达到所需的总时间。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















