















































软件

产品


在机械设计中,常用的配合类型:间隙、过渡和过盈,其本质是在描述零件之间的干涉状 态,在我们使用 SOLIDWORKS(以下简称 SW)进行设计时,如何对零件、静态装配体以及动态 装配体进行干涉检查。
对于干涉常常是“谈虎色变”,但其实它在实际设计工程中运用也比较多,如在 GB (国标)中有过盈这类代表干涉的配合类型,此类配合在一些重载和密封等行业被广泛 运用。我们今天主要讨论在 SW 的设计环境下,针对各类不同的对象进行干涉检查:
1. 零件干涉检查
在SOLIDWORKS零件,同一个实体,代表软件已经做过布尔运算,所以不会存在干涉现象, 所以对零件的干涉检查,换句话就是多实体的干涉检查。下图对 SW 的实体显示方式 进行了部分举例。

图一 在 SW 多实体的显示方式举例
对多实体零件干涉检查步骤: Step 1.新建装配体,将需要的检查零件插入到装配体
Step 2.在装配体环境下,点击【评估】
Step 3.点击【干涉检查】
Step 4.勾选【包括多体零件干涉】 Step 5.运行【计算】

图二 对零件干涉检查步骤
2. 静态干涉检查
对静态装配体的干涉检查的步骤,同零件在装配体环境下进行干涉检查一致(【包 括多体零件干涉】选项默认一般是不勾选的,使用时酌情使用)。
3. 运动干涉检查
产品在运动中如果干涉,通常代表着碰撞和磨损,在实际设计中,我们是要尽量去 避免的。在这里简单简单和复杂,我的主要分类标准是维度:简单干涉检查只涉及现实 空间的三个维度(如长、宽、高),而复杂干涉检查是在其此基础上添加时间维度,这 也是大多数产品的真实工作状态。
a) 简单运动干涉检查
对于简单动态装配体检查,我们主要分两类,一种是靠机构传递运动,另 一种是靠接触传递运动

图四 由机构传递运动示例
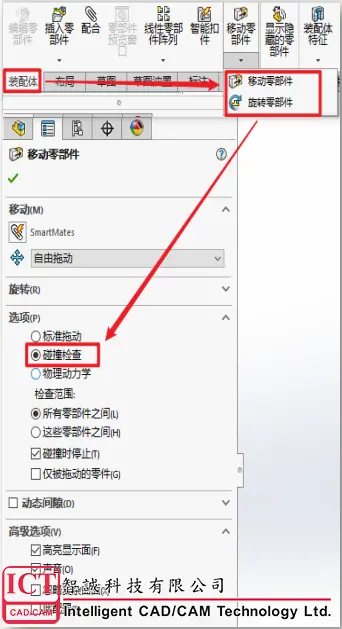
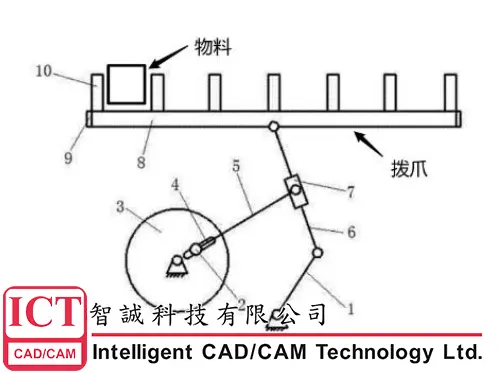
II.接触传递运动 此类只是对干涉的拓展运用,并非干涉检查, 如下图拨 爪送料机构,拨爪和物料之间 的运动,主要靠接触(对于计 算机来将干涉量为 0 时即为 接触)来实现,此时我们将使 用左图中【物理动力学】。
b) 复杂运动干涉检查 对于一个运动的产品,它在真实环境下的运动,除了考虑三维的干涉外,还需代入 时间这个维度,这类问题在学术上称为动力学仿真,SW 的动力仿真 MOTION 是以在 动力学仿真占据主导地位的 ADMAS®提供支持,对于一般性的动力学问题,我们可以 在 SOLIDWORKS 中进行,对于复杂问题需要借助 ADMAS 高阶模块,我们也可以导 出到 ADMAS,实现数据无缝兼容。
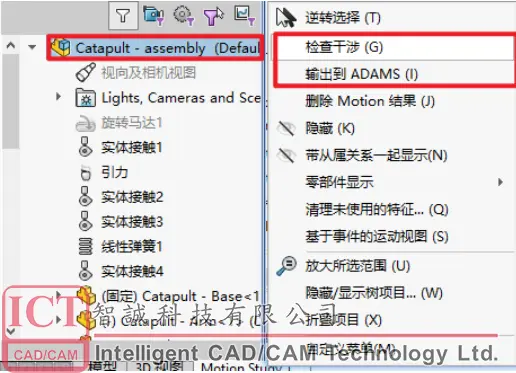
图六 对复杂运动的干涉检查
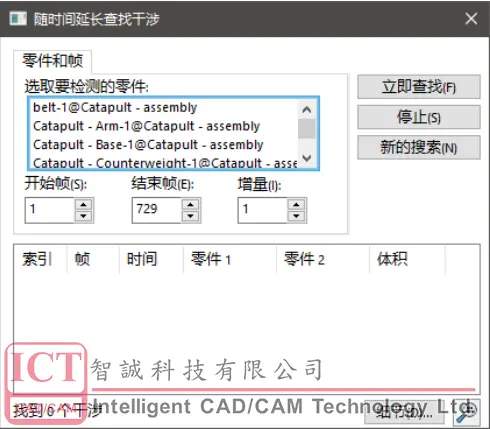
图七 选择检查内容与精度(帧数)
原文链接:https://www.ict.com.cn/skilldetails/274.htm
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















