1 引言
数控机构作为一种自动化的定位部件或模块,广泛应用于机器设备和自动化仪器领域。相对于系统本体而言,数控机构仅仅是一个独立的部件,有其机械原点和坐标系统,而它的作用对象是在系统本体上,有自己的分布规则和坐标系统。从理论上而言,应该保证这两个坐标系统处于正确的位置关系时才能保证系统的工作要求。实际上在装配调整中,由于数控位置部件和系统本体的制造和安装误差的存在,为了便于装配加工,往往只需保证数控部件与系统本体满足一定的位置条件,而通过一定的位置调整方法来进行校正。笔者在基因芯片自动化分析仪器的数控定位器和投影式全自动视野仪的激光二维扫描装置的装配中,均采用了坐标位置校正方法来实现系统正常的位置关系,降低了装配调整工作的技术难度。
2 自动寻找原点的方法
机械原点是数控机构各坐标轴的绝对零点,是各坐标轴运动位置的基本参考点,由安装在各轴的零位开关唯一确定。由于机械系统运动时具有一定的惯性,电动机转动时具有升频、稳速、降频三阶段,为保证数控机构在零位开关触发时,坐标轴立即停止运动,电动机必须运行在低频某一恒定的速度段。系统在自动寻找原点时,在指定方向每运动一步后,即检查零位开关是否触发,若开关已工作,即确定该位置为此坐标轴的零点。
3 数控机构位置校正软件和控制面板设计
为解决数控机构的位置调整问题,笔者设计了基本的校正软件和控制面板,研究了一些数控机构的校正算法,包括以下功能。
- 点动方式 为调整数控机构坐标轴的位置,控制面板设计有各轴的点动方式,其最小点动当量为电动机的最小运动当量。
- 自动寻找原点方式 自动寻找原点并显示运动距离或步数,设计有x-gozero(),y-gozero()函数。
- 校正算法 是数控机构位置调整的核心,不同的数控机构要确定自己的校正算法。
- 配置文件 记录数控机构位置校正的基本参数值,由校正算法计算后自动生成,作为数控机构正常运行的基本配置文件。
4 基因芯片自动化分析仪器数控定位器的位置校正方法
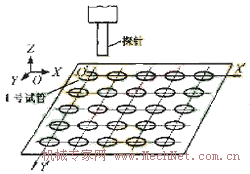
在仪器本体上有由25个相距9mm的试管组成的样本区,其具有一个以1#试管中心为原点的样本坐标系XOY。数控定位器带动取样探针运动到指定编号的试管位置,进行取样工作。该数控定位器为典型的平面二坐标数控机构,在X轴和Y轴上用接近开关分别设置有机械零位。由于数控定位器是作为一个部件整体安置在仪器上的,考虑到制造的经济性,在装配时利用定位元件保证样本区的坐标系与数控定位器的坐标系平行,这时位置校正参数为这两坐标系的平移值。 位置校正时,利用点动命令将探针移动到1#试管位置,此为样本坐标系的原点。启动自动寻找原点功能和调用该函数,X、Y轴自动回零,并显示实际各坐标移动距离并写入配置文件,完成数控定位器的位置校正。
5 投射式全自动视野仪激光二维扫描装置的位置校正方法
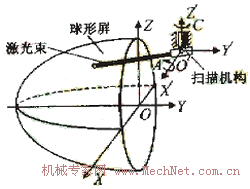
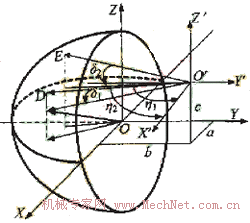
图2 所示为投射式全自动视野仪的投射原理,投射屏为直径330mm 的半球内壁,激光二维扫描装置悬挂在空中,将光束投射在球内壁上,生成视标。光学投射系统在水平面和垂直面上可分别由步进电动机带动作C轴、A轴旋转运动,将光标投向屏幕上的设定位置。 由于在装配中制造误差和调整误差的影响,很难保证光学投射系统安装后相对半球屏的准确位置和视标的正确投射位置,因而应确定该系统的实际工作位置,进行必要的校正。 如图3所示,假定知道球面上任意两点D(x1,y1,z1)和E(x2,y2,z2),并测得此时的d和h分别为d1、h1和d2、h2,由几何关系可得如下方程。
 |
| sind1= |
c-z1 |
| |
| [(x1-a)2+(y1-b)2+(z1-c)2]? |
|
|
|
| sind2= |
c-z2 |
| |
| [(x2-a)2+(y2-b)2+(z2-c)2]? |
|
|
|
|
(1) |
解上面方程组得到a、b、c 调整值为
.gif) |
| a= |
x1tgh1-x2tgh2+|y1|-|y2| |
| |
| tgh1-tgh2 |
|
| b= |
(x1-x2)tgh1tgh2+|y1|tgh2-|y2|tgh1 |
| |
| tgh1-tgh2 |
|
| c=z1+|tgd1|[(x1-a)2+(z1-b)2]? |
|
(2) |
由上述分析可知,激光二维扫描装置安装后,将光束从零点分别移动到半球屏的已知两点,确定两旋转轴的运动值,并代入式(2),即可计算出激光器的实际位置O(a,b,c),以此作为光标位置控制的基本参数。
6 结语
数控部件与系统本体的位置调整对系统工作质量至关重要。低速度回零是保证坐标轴准确定位于机械原点的前提。不同的数控机构都可以选择一定的调整校正方法来降低装配的技术难度。
模具联盟网,欢迎访问www.uggd.com
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。



















































 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















