















































软件

产品


T1 = SE2(1,3,30,"deg");trplot2(T1,"frame","1","color","b");axis([0 5 0 5]);T2=trans12(3, 4);
hold on;trplot2(T2,"frame","2","color","r");1.2.3.4.5.6.运行效果:

R1=rotx(30,"deg")*roty(50,"deg"); %绕x轴旋转30°,再绕y轴旋转50°trplot(R1,"frame","A", "color", "b");
%画出旋转矩阵R1tranimate(R1,"frame","A", "color", "b"); %将R1的变换做成动画R2=roty(50,"deg")*rotx(30,"deg");
%绕y轴旋转50°,再绕x轴旋转30°hold ontrplot(R2,"frame","B", "color", "r");
%画出旋转矩阵R2tranimate(R2,"frame","B", "color", "r"); %将R2的变换做成动画1.2.3.4.5.6.7.运行效果:
R1和R2是两个完全不同的旋转矩阵,说明R1和R2具有不可交性。
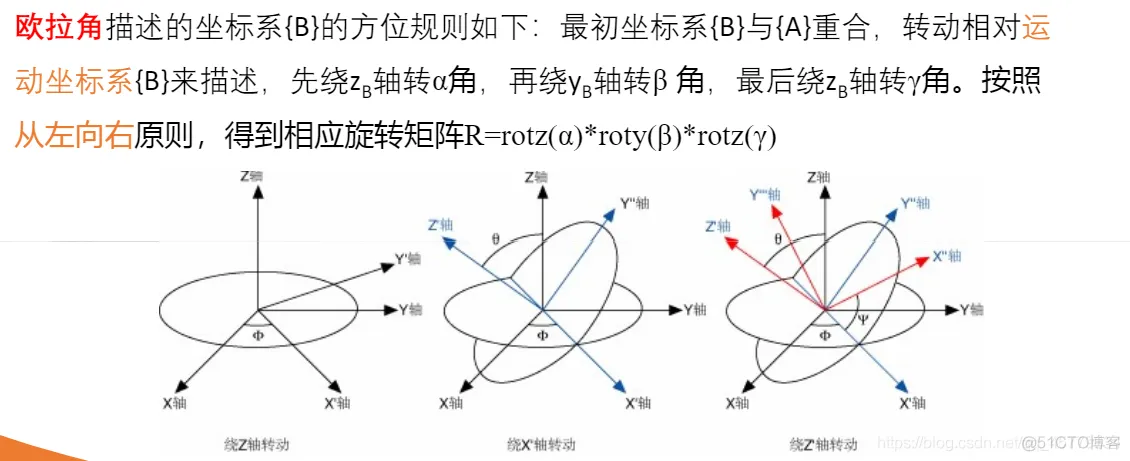
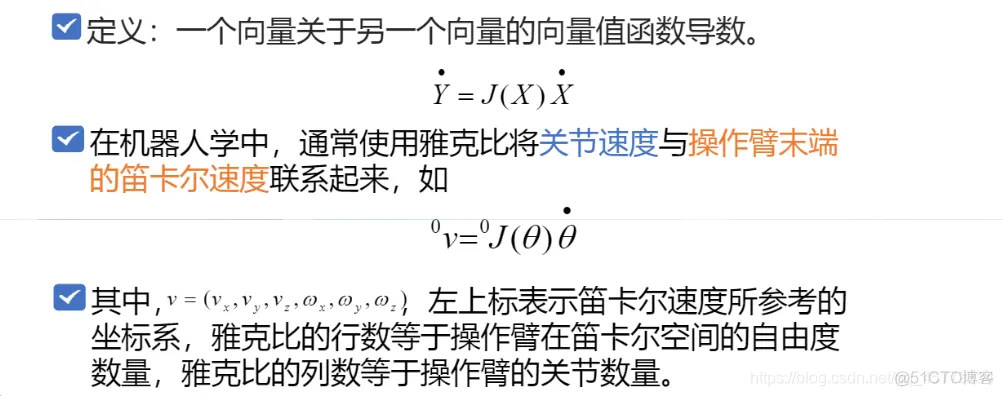
欧拉角是在
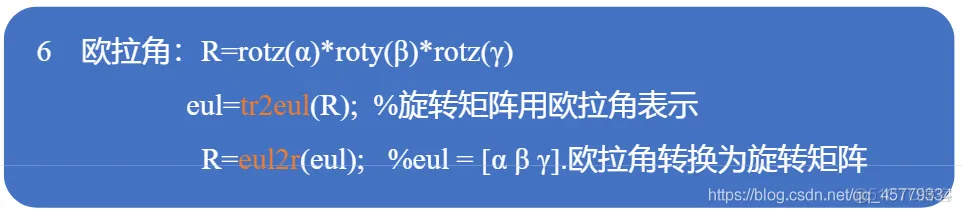
R3=rotz(0.1)*roty(0.2)*rotz(0.3); % 构造旋转矩阵R3R4=eul2r(0.1,0.2,0.3);
% 欧拉角转化为旋转矩阵eul=tr2eul(R3); % 旋转矩阵转化为欧拉角1.2.3.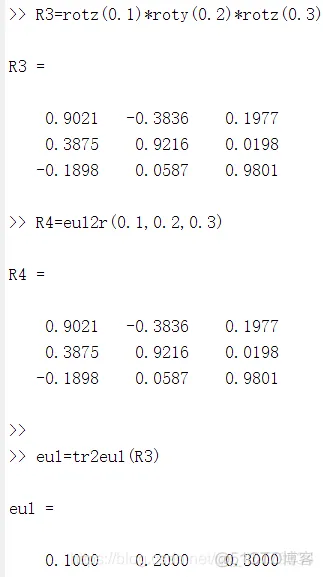
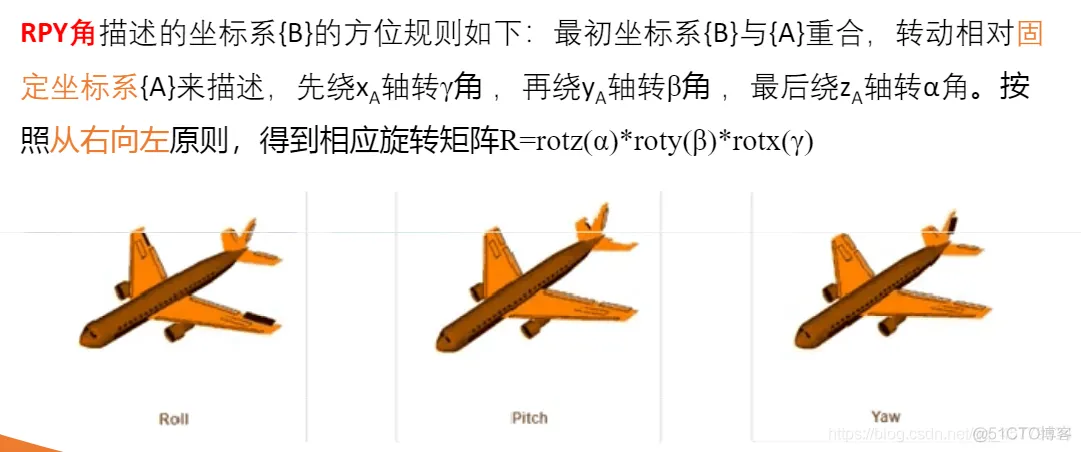
RPY角是在固定坐标系A下,以固定的XYZ轴作为旋转的基准。三个角分别为Row(回转),Pitch(俯仰)和Yaw(偏转),可以用右手坐标系表示,食指为Row,中指为Pitch,大拇指为Yaw。
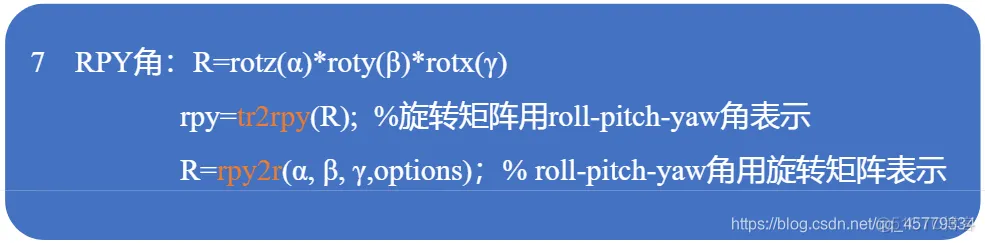
R5=rotz(0.3)*roty(0.2)*rotx(0.1); % 构造旋转矩阵R5R6=rpy2r(0.3,0.2,0.1);
% rpy角转化为旋转矩阵eul=tr2rpy(R5); % 旋转矩阵转化为rpy角1.2.3.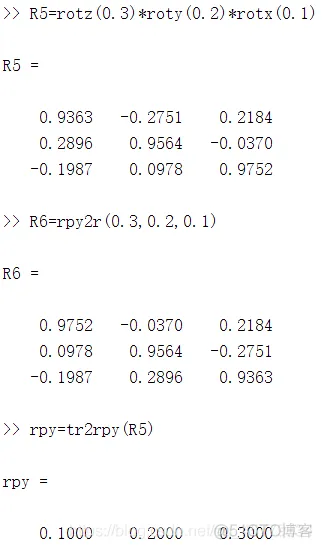
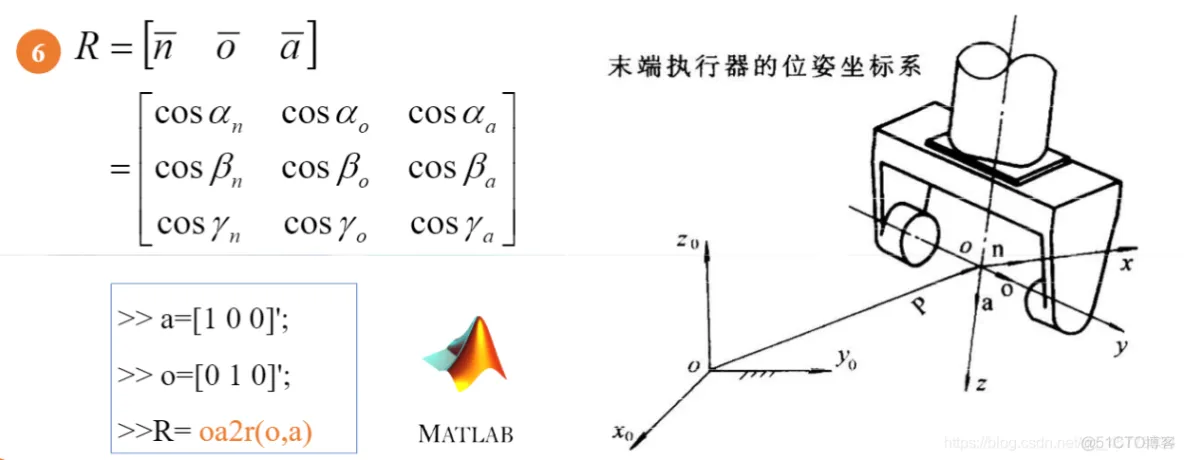
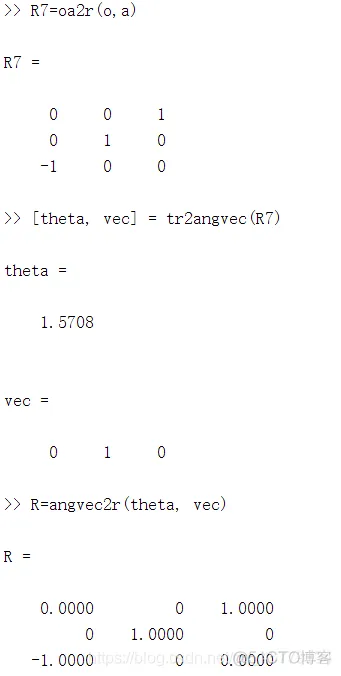
a=[1 0 0]';o=[0 1 0]';R7=oa2r(o,a); % 将双向量o,a转化为旋转矩阵R71.2.3.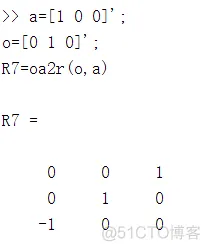
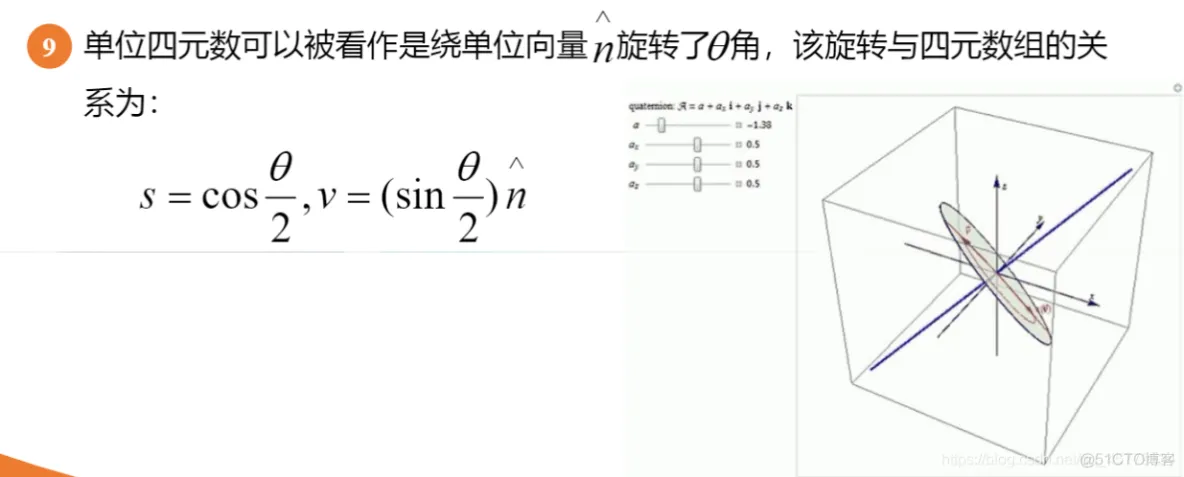
s=0.98335;v=[0.034271, 0.10602, 0.14357];Q=UnitQuaternion(s,v); % 组成四元数q=Q.inv(); % 求共轭Q.display(); % 打印出四元数Q.plot(); % 画出出四元数Q.animate(); % 动画展示四元数TT=Q.T; % 制作齐次变换矩阵RR=Q.R; % 制作旋转矩阵rpy=Q.torpy(); % 转换成rpy角eul=Q.toeul(); % 转换成eul角1.2.3.4.5.6.7.8.9.10.11.
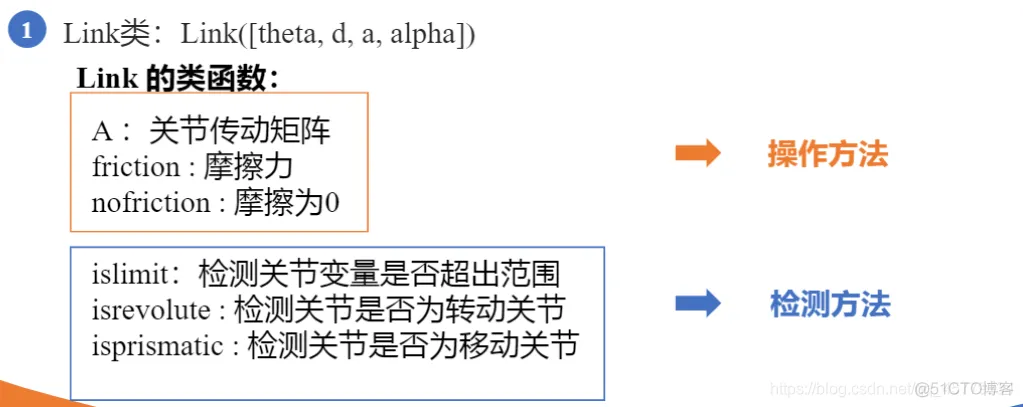
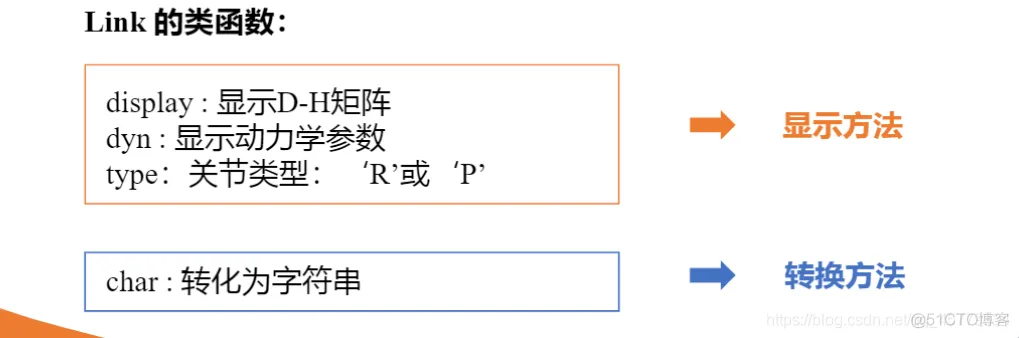

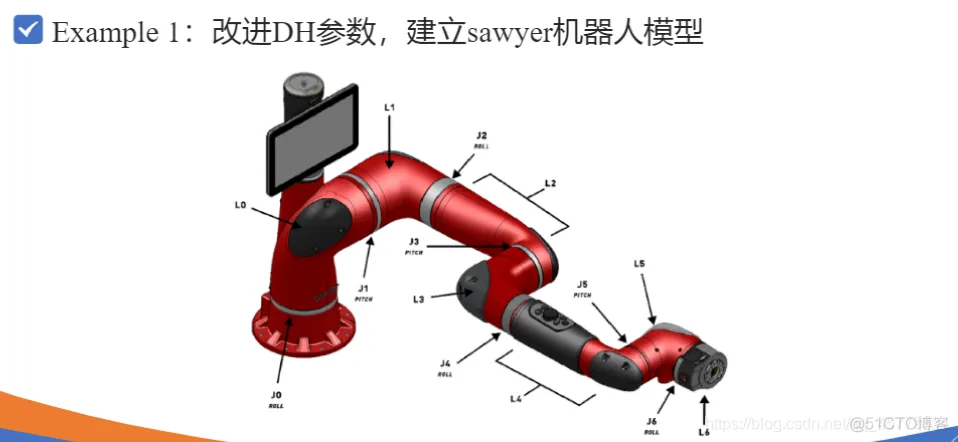
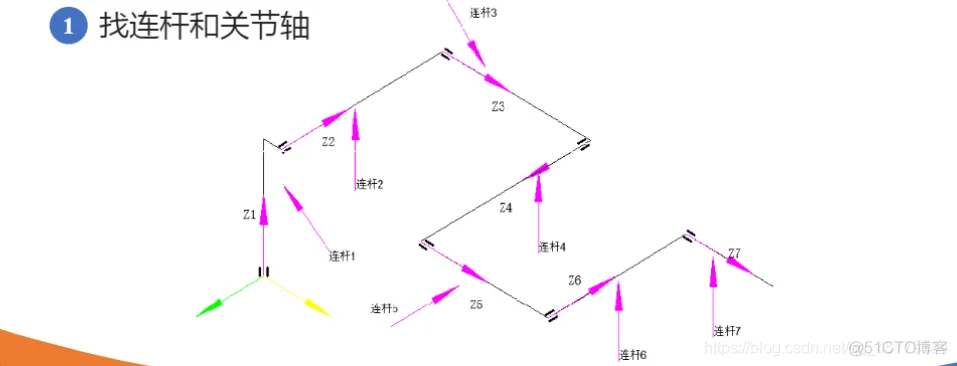
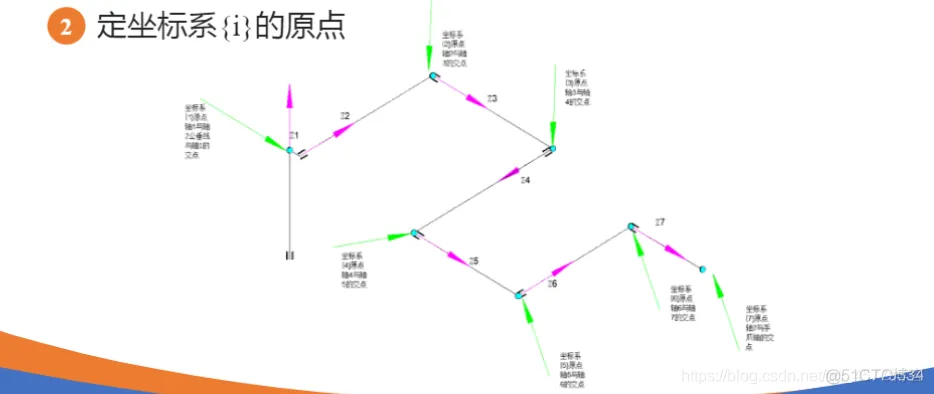
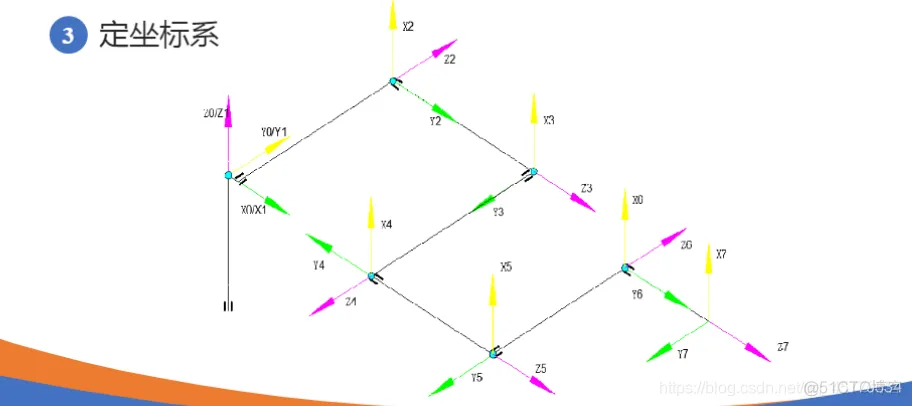
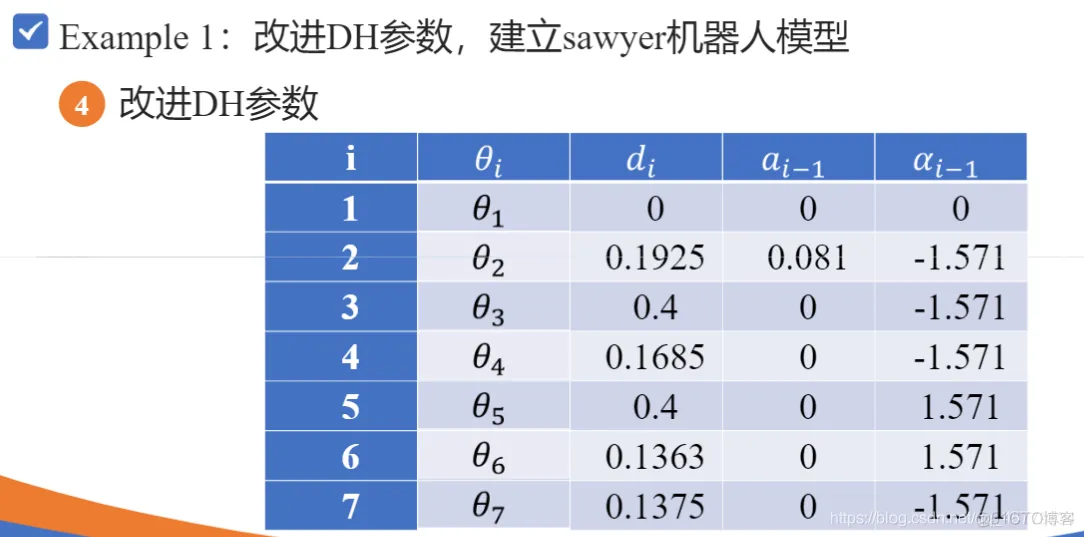
clc;clear;% 定义各个连杆以及关节类型,默认为转动关节% theta d a alpha% 连杆偏距参数d 连杆长度参数 关节偏角参数alphaL1=Link([ 0 0 0 0], 'modified'); % [四个DH参数], optionsL2=Link([ -pi/2 0.1925, 0.081 -pi/2], 'modified');L3=Link([ 0 0.4 0 -pi/2], 'modified');L4=Link([ 0 0.1685, 0 -pi/2], 'modified');L5=Link([ 0 0.4, 0 pi/2], 'modified');L6=Link([ 0 0.1363 0 pi/2], 'modified');L7=Link([ 0 0.13375 0 -pi/2], 'modified');% b=isrevolute(L1);robot=SerialLink([L1,L2,L3,L4,L5,L6,L7]); % 将七个连杆组成机械臂robot.name='modified sawyer';robot.display(); % 展示出view(3); % 解决robot.teach()和plot的索引超出报错robot.teach();robot.plot([0 -pi/2 0 0 0 0 0]);1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.
clc;clear;% 定义各个连杆以及关节类型,默认为转动关节% theta d a alpha% 连杆偏距参数d 连杆长度参数 关节偏角参数alphaL1=Link([ 0 0 0 0], 'standard'); % [四个DH参数], optionsL2=Link([ -pi/2 0.1925, 0.081 -pi/2], 'standard');L3=Link([ 0 0.4 0 -pi/2], 'standard');L4=Link([ 0 0.1685, 0 -pi/2], 'standard');L5=Link([ 0 0.4, 0 pi/2], 'standard');L6=Link([ 0 0.1363 0 pi/2], 'standard');L7=Link([ 0 0.13375 0 -pi/2], 'standard');% b=isrevolute(L1);robot=SerialLink([L1,L2,L3,L4,L5,L6,L7]); % 将七个连杆组成机械臂robot.name='standard sawyer';robot.display(); % 展示出view(3); % 解决robot.teach()和plot的索引超出报错robot.teach();robot.plot([0 -pi/2 0 0 0 0 0]);1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.
mdl_puma560; % 加载puma560模型qz % 零角度qr % 就绪状态,机械臂甚至且垂直qs % 伸展状态,机械臂伸直且水平qn % 标准状态,机械臂处于灵巧工作状态view(3);p560.plot(qn);T=p560.fkine(qn);1.2.3.4.5.6.7.8.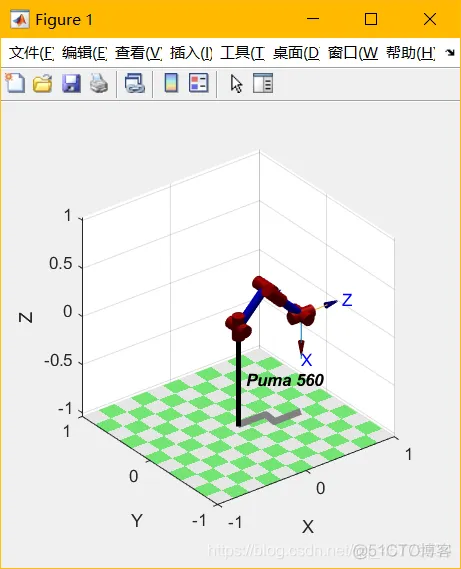

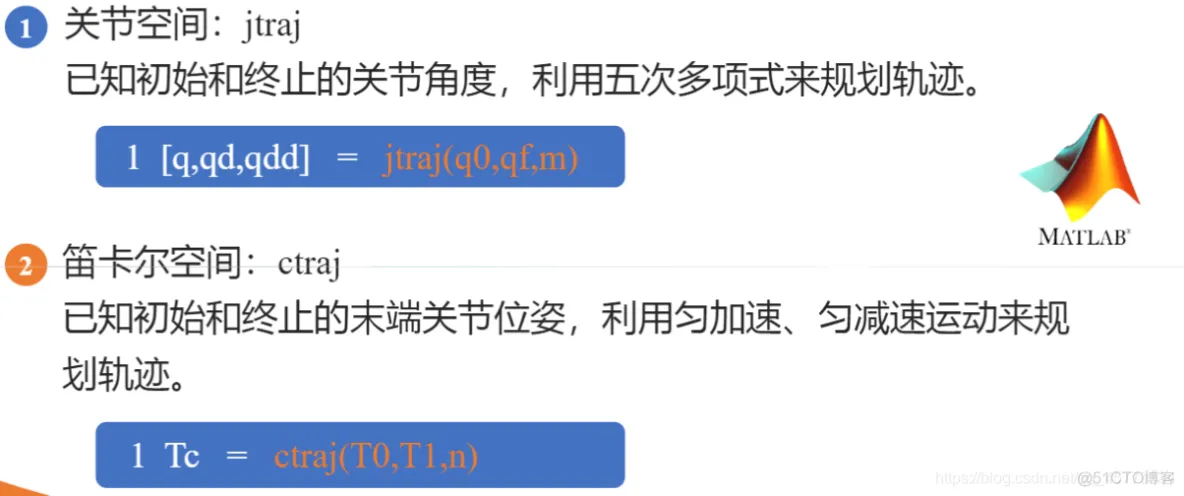
clc;clear;% 定义各个连杆以及关节类型,默认为转动关节% theta d a alpha% 连杆偏距参数d 连杆长度参数 关节偏角参数alphaL1=Link([ 0 0 0 0], 'modified'); % [四个DH参数], optionsL2=Link([ -pi/2 0.1925, 0.081 -pi/2], 'modified');L3=Link([ 0 0.4 0 -pi/2], 'modified');L4=Link([ 0 0.1685, 0 -pi/2], 'modified');L5=Link([ 0 0.4, 0 pi/2], 'modified');L6=Link([ 0 0.1363 0 pi/2], 'modified');L7=Link([ 0 0.13375 0 -pi/2], 'modified');% b=isrevolute(L1);robot=SerialLink([L1,L2,L3,L4,L5,L6,L7],'name','FANUC'); % 将七个连杆组成机械臂robot.name='modified sawyer';robot.display(); % 展示出init_ang=[0 0 0 0 0 0 0];targ_ang=[pi/4,-pi/3,pi/5,pi/2,-pi/4,pi/2,pi/3];step=200;[q,qd,qdd]=jtraj(init_ang,targ_ang,step); %关节空间规划轨迹,得到机器人末端运动的[位置,速度,加速度]T0=robot.fkine(init_ang); % 正运动学解算Tf=robot.fkine(targ_ang);subplot(2,4,3); i=1:7; plot(q(:,i)); title("位置"); grid on;subplot(2,4,4); i=1:7; plot(qd(:,i)); title("速度"); grid on;subplot(2,4,7); i=1:7; plot(qdd(:,i)); title("加速度"); grid on;Tc=ctraj(T0,Tf,step);Tjtraj=transl(Tc);subplot(2,4,8); plot2(Tjtraj, 'r');title('p1到p2直线轨迹'); grid on;subplot(2,4,[1,2,5,6]);plot3(Tjtraj(:,1),Tjtraj(:,2),Tjtraj(:,3),"b"); grid on;hold on;view(3); % 解决robot.teach()和plot的索引超出报错qq=robot.ikine(Tc);robot.plot(qq);1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















